Кан программатор – Программатор
2CAN Мастер — CAN — модули — Каталог — Научно-производственное объединение СтарЛайн
Модуль 2CAN позволяет упростить установку охранных комплексов StarLine на автомобили, оснащенные одной или несколькими цифровыми шинами CAN. Интерфейс 2CAN обеспечивает наиболее полный функционал на автомобилях Chevrolet, Citroen, KIA, Opel, Peugeot.
Модуль 2CAN предназначен для установки в сигнализаци четвертого поколения: StarLine D94,
StarLine D64, StarLine B94, StarLine E90 и т.д., включая StarLine A93 и StarLine A63.
Для удобной настройки и обновления программного обеспечения модуля 2CAN скачайте приложение «Программатор StarLine CAN Телематика» с сайта can.starline.ru.
Поддерживаемые функции:
Чтение информации о состоянии концевиков дверей, капота и багажника, педали тормоза и стояночного тормоза, зажигания, работе двигателя.
Управление центральным замком и штатной сигнализацией, аварийной сигнализацией, функцией «комфорт», отпиранием багажника и имитацией открывания двери водителя.
Список поддерживаемых моделей автоомобилей и функций для каждого автомобиля смотрите на сайте can.starline.ru.
Инструкция по программированию
Технические характеристики
| Напряжение питания, В | 9…18 | ||
| Максимальный ток потребления в рабочем режиме, не более, мА | 70 | ||
| Максимальный ток потребления в дежурном режиме, не более, мА | 0,5 | ||
| Диапазон рабочих температур, °С | -50…+80 | ||
| Максимальная относительная влажность воздуха, % | 95 |
Спасибо за Ваш выбор. Пожалуйста, заполните форму. Мы обязательно свяжемся с Вами в течение 24 часов.
Поля, отмеченные звёздочкой, обязательны для заполнения
www.ultrastar.ru
Can (Кан) прошивка схема , Can hacker , Подмотка , Накрутка , Как работает , USB подмотка
Подмотка, Кан накрутка, Крутилки, Намотка Can, Моталка спидометра, Can подмотка, Намотка одометра, Шумахеры, Корректор одометра и многие другие названия Вы слышали для этого полезного устройства!
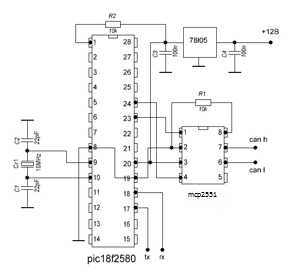
В этом разделе хочу поделиться с Вами некоторыми знаниями о моталках. Если Вы это читаете, значит хотите сэкономить на покупке устройства , собрав его самостоятельно! Итак, начнём! Примерная схема аналоговой намотки ( их существует огромное количество )
Все детали для сборки можно приобрести в любом радиомагазине или заказать через интернет. Но есть нюанс, на каждом авто свои места и способы подключения. Для неосведомлённого в данной сфере человека, найти способ и место подключения, представится задачей повышенной сложности. Для многих и вовсе не разрешимой. Первые мои намотки собирались на платке с использованием деталей в DIP корпусе и выглядели хоть и стрёмно, но практично работают до сих пор !
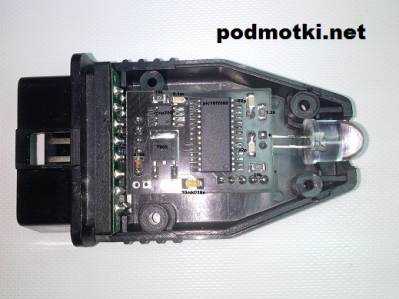
Сейчас предлагаемая мной намотка собирается на плате с использованием SMD деталей и внутри всё качественно защищено от повреждений и вредного воздействия влаги слоем компаунда. Эта подмотка подходит на все автомобили с датчиком скорости, как легковые, так и грузовые.


Схема CAN намотки (когда-то сам искал) есть везде и это не секрет, самая простая выглядит так
Сами девайсы у меня выглядят так



Вариантов схем много на любой вкус, есть и сложнее, но везде есть микроконтроллер (это как миниатюрный компьютер) который посылает в шину CAN определённую информацию с нужной частотой и скоростью, основой, а точнее самой значимой частью, является прошивка, которая заливается в микроконтроллер намотки, все изготовители держат её в строгом секрете (этот секрет можете купить у меня). Информация, передаваемая в шину для каждого авто своя и она также держится в секрете. Добыть её можно любым анализатором CAN шины (я пользуюсь CAN-Hacker). Для тех, кто думает, что это легко и просто представлю вам видео, на котором показана работа анализатора и будьте осторожны подбором можно с легкостью УЛОЖИТЬ панель и не только !
Также расскажу немного о главном, прошивка, записанная в микроконтроллер, только даёт команду для вывода в шину информации, которая записывается Eeprom, туда записываем Id (имя определённого блока авто, можно сказать, это имя одометра), Data (информация в которой говорится с какой скоростью движется авто), период передаваемой информации, скорость шины. Также возможно ограничить работу намотки по времени ( по окончании времени она просто отключится и становится обычной «пластмассой с детальками» ) так заполняется Eeprom для pic контроллера.
Всем спасибо, надеюсь эта информация для Вас была полезна.
podmotki.net
Программатор CAN Телематика — PDF
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
Пакет программного обеспечения SCHER-KHAN OpWin 2.0 РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ СОДЕРЖАНИЕ: 1. Общие сведения. 1.1. Назначение. 1.2. Системные требования. 2. Подготовка к работе. 2.1. Установка программного
ПодробнееРуководство по установке
Регистр МО Руководство по установке Данное руководство поможет вам установить и провести начальную настройку Регистр МО ВИР Оглавление Минимальные системные требования… 3 Установка Регистр МО… 4 Настройка
ПодробнееРуководство по установке
Регистр МО Руководство по установке Данное руководство поможет вам установить и провести начальную настройку Регистр МО ВИР Оглавление Минимальные системные требования… 3 Установка Регистр МО… 4 Настройка
Инструкция по установке ОМС-плеера
Инструкция по установке ОМС-плеера 1. Требования к аппаратному обеспечению Процессор Оперативная память Видеокарта ПК с процессором Pentium IV 1.0 ГГц. не менее 256 МБ ОЗУ Видеокарты, обеспечивающие аппаратную
ПодробнееИНСТРУКЦИЯ ПО УСТАНОВКЕ
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ для автоматизации процесса ведения лицевых счетов распорядителями, получателями бюджетных средств и финансовыми органами «Муниципальное казначейство» свидетельство об официальной
ПодробнееРуководство по установке
Прочитайте перед использованием Программа создания рисунков вышивания PE-Design8 Руководство по установке Прочитайте перед вскрытием упаковки компакт-диска Благодарим вас за приобретение нашей программы!
ПодробнееРуководство пользователя
Руководство пользователя HP Development Company, L.P., 2016. AMD является товарным знаком корпорации Advanced Micro Devices, Inc. Google Inc., 2012. Все права защищены. Google является товарным знаком
Подробнее1 О программе TDrive
Содержание 1 О программе TDrive… 3 1.1 О программном обеспечении… 3 1.2 О руководстве пользователя… 3 2 Общее описание… 4 2.1 Описание главного окна TDrive… 4 2.1.1 Область работы с проектом
ПодробнееРуководство по установке
Прочитайте перед использованием Программа создания рисунков вышивания Руководство по установке Прочитайте перед вскрытием упаковки компакт-диска Благодарим вас за приобретение нашей программы! Прежде чем
Aura Office Краткое руководство оператора
Программный комплекс автоматизированного сбора, учета данных и управления устройствами АСКУЭ «Аура» Aura Office Краткое руководство оператора ООО «РиА-Групп» 2017г. Данное руководство предназначено для
ПодробнееАдаптер-интерпретатор CANFMS-3
Адаптер-интерпретатор CANFMS-3 РУКОВОДСТВО ПО НАСТРОЙКЕ И ПОДКЛЮЧЕНИЮ К ТРАНСПОРТНОМУ СРЕДСТВУ И К ТЕРМИНАЛУ СМТ ООО НПП «АСЕ» Россия, Ростов-на-Дону Оглавление 1. Подключение адаптера к источнику питания.
ПодробнееОбновление ПО металлодетекторов
Версия 1.1 Обновление ПО металлодетекторов СЛЕДОПЫТ-М КОРСАР ЛЕГИОНЕР РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ 2004 г. 1. Введение С помощью программы MTDETECTBOOT_11.EXE Вы можете обновлять программное обеспечение (далее
ПодробнееКомплект поставки. Индикаторы
1 Комплект поставки ADSL2+ роутер UPVEL UR-101AU Инструкция по подключению и настройке Компакт-диск с утилитой для настройки и руководством пользователя Блок питания (внешний) Кабель UTP (витая пара)
ПодробнееКомплекс автодиагностики КАД400-02
УТВЕРЖДЕН -ЛУ Подпись и дата Комплекс автодиагностики КАД400-02 Программный продукт Инструкция по установке и настройке Страниц 21 Подпись и дата Инв. подл. Взам. инв. Инв. дубл. 2010 3 Аннотация Настоящая
ПодробнееУстановка программы «CL-works»
СОДЕРЖАНИЕ: СОДЕРЖАНИЕ:… 1 Установка программы «CL-works»… 2 Запуск программы установки… 2 Первые шаги установки… 2 Основной этап установки, ввод необходимой информации… 3 Завершающий этап установки…
Комитет финансов Санкт-Петербурга
Комитет финансов Санкт-Петербурга Технологическая инструкция по настройке электронного взаимодействия с «Автоматизированной информационной системой бюджетного процесса электронное казначейство» с использованием
ПодробнееОбновление Windows Vista до Windows 7
Обновление Windows Vista до Windows 7 В зависимости от имеющегося у вас оборудования и текущего выпуска Windows Vista, в процессе установки Windows 7 вы можете использовать вариант Обновление, чтобы перейти
Подробнее1 Назначение программы
Содержание 1 Назначение программы…2 2 Подключение и установка программы…3 2.1 Подключение установки с встроенным радиоканалом к ПК…3 2.2 Связывание установки с ПК, на котором установлена операционная
ПодробнееРуководство пользователя ЭИ РП
Руководство пользователя ЭИ.206.00.000РП СОДЕРЖАНИЕ 1 НАЗНАЧЕНИЕ… 2 2 ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ… 2 3 РАБОТА С КОНФИГУРАТОРОМ… 3 4 УДАЛЕНИЕ ПРОГРАММЫ… 12 Версия: 26.09.2018_А6 Руководство по работе
ПодробнееСенсорная панель и клавиатура
Сенсорная панель и клавиатура Руководство пользователя Copyright 2007 Hewlett-Packard Development Company, L.P. Windows является торговой маркой корпорации Microsoft, зарегистрированной в США. Информация,
Подробнеепользователя системы Windows Vista
КРАТКОЕ РУКОВОДСТВО пользователя системы Windows Vista Содержание Глава 1. Системные требования…… 1 Глава 2. Установка программного обеспечения принтера в WINDOWS… 2 Установка программного обеспечения
ПодробнееDeta-Elis Europa GmbH. Редакция 1. DeVitaCenter.Com
DeVitaCenter.Com Deta-Elis Europa GmbH Редакция 1 DeVitaCenter.Com СОДЕРЖАНИЕ Лицензионное соглашение 4 Условия Соглашения 4 Введение 5 Преимущества ПО «DeInfo Mini» 1. Структура и возможности программы
ПодробнееEcoReport. 2-ТП (воздух) версия 1.0
РУКОВОДСТВО ПОЛЬЗОВАТЕЛЯ ПРОГРАММНОГО ПРОДУКТА СИСТЕМА ФОРМИРОВАНИЯ СТАТИСТИЧЕСКОЙ ОТЧЕТНОСТИ ПО ФОРМАМ 2-ТП (ВОЗДУХ) И 2-ТП-ВОЗДУХ (СРОЧНАЯ) EcoReport. 2-ТП (воздух) версия 1.0 Версия руководства: 1.0
ПодробнееСервер обедов Gate-Dinner
Сервер обедов Версия 1.12 Руководство оператора Санкт-Петербург 2006 Равелин Оглавление 1. ОБЩЕЕ ОПИСАНИЕ… 3 1.1 НАЗНАЧЕНИЕ СИСТЕМЫ… 3 1.2 СОСТАВ ОБОРУДОВАНИЯ И СИСТЕМНЫЕ ТРЕБОВАНИЯ… 3 1.3 АЛГОРИТМ
ПодробнееАвтоЛиквидатор Версия 1.1
АвтоЛиквидатор Версия 1.1 Установка и регистрация программы 2005-2006 Русские Информационные Технологии 1. Введение Настоящий документ является руководством по установке и настройке к программному продукту
ПодробнееПрограмматор блоков ПБ-6
Программатор блоков ПБ-6 ПАСПОРТ САМАРА 2013 P65A05PS0113-А3 2 НПП «НТС» СОДЕРЖАНИЕ 1. Назначение…3 2. Основные технические данные и характеристики…3 3. Комплект поставки…4 4. Порядок работы…5
Подробнееdocplayer.ru
CAN Hacker 3.0 (Ch4.X) — CAN Hacker

CAN-Hacker 3.0 (3.X) — Универсальный двухканальный USB-CAN адаптер
Купить CAN-Hacker
Дополнительные опции и программы
Примеры использования CAN-Hacker на автосервисе
Актуальное руководство по быстрому старту
CAN-Hacker 3.0 (далее Ch4.X) это наш базовый продукт, представляет собой универсальный USB адаптер CAN шины с возможность как аппаратного так и программного расширения функционала. С помощью этого адаптера Вы сможете:
- Анализировать работу CAN и LIN шин автомобилей и спец. техники.
- Включать «на столе» блоки управления и агрегаты автомобилей управляемые по CAN и LIN шинам (например рулевые рейки и агрегаты ЭГУР)
- Эмулировать работу датчиков и блоков управления непосредственно на автомобиле
- Программировать блоки управления автомобилей.
Все эти возможности окажут неоценимую поддержку в процессе ремонта автомобилей, а так же во время установки и разработки дополнительного охранного, телематического и навигационного оборудования для любой подвижной техники.
Достоинства CAN-Hacker 3.0:
- Два канала CAN с возможностью проброса пакетов из канала в канал
- Подключаемые терминаторы 120 Ом
- Возможность работы с LIN шиной. (дополнительная опция)
- On-line обновление
CAN-Hacker 3.x может работать как со старым ПО CAN-Hacker 2.002 так и с новым CAN анализатором, который входит в комплект поставки.
canhacker.ru
Программирование CAN конструктора
В данной статье мы рассмотрим пример программирования CAN передатчика на 16 сообщений с настраиваемым шагом с полным диапазоном ID.
Пример нахождения ID адреса и формирования пакета сообщений для имитации определённого узла или блока автомобиля при помощи CAN сканера мы рассматривали в статье Работа с программой CAN Scanner.
1. Подключаем к программатору PICkit2 конструктор, в который хотим прописать содержимое сообщений для передачи по CAN шине. Программатор может быть использован любой для программирования PIC микроконтроллеров.
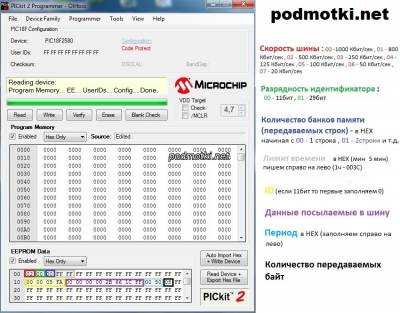
2. Запускаем программу PICkit2.
3. Нажимаем кнопку Read для считывания данных из памяти микроконтроллера конструктора. Содержимое областей памяти отображается в соответствующих окнах. При программировании микроконтроллера изготовителем установлена защита. Соответственно, при считывании будут считаны нули в окне Program Memory (Память Программ).
4. В окне Program Memory (Память Программ) убираем галочку Enabled (Включен). Внимание: Program Memory (Память Программ) должна быть при программировании не активна, в противном случае программа передатчика будет стёрта.
5. В окне EEPROM Data прописываем нужные настройки и содержимое сообщений в соответствии с рисунком ниже.
6. Далее нажимаем кнопку Write, и сконфигурированные сообщения запишутся в микроконтроллер.
7. В случае, если сконфигурированные сообщения не устроили по каким-либо причинам, то повторить процедуру программирования.

Теперь рассмотрим процедуру поэтапного программирования CAN конструктора:
1. В окне Program Memory (Память Программ) убираем галочку Enabled (Включен), в соответствии с рисунком выше.
2. Если 00, то CAN ID будут стандартной длины 11 бит, если 01, то расширенные — 29 бит.
3. Значение CAN ID, присутствие которого на шине запускает данный передатчик. Сначала слева младший байт, затем старший.
4. Строки с индивидуальными настройками сообщений. 10 — первое сообщение, 20 — второе, и так далее. Всего 15 сообщений с номерами с 10 по F0.
5. 00 — сообщение игнорируется и не будет передаваться на шину, 01 — сообщение передаётся в соответствии с настройками.
6. CAN ID соответствующего сообщения. Сначала слева младший байт, затем старший.
7. Количество байт данных от 0 до 8.
8. Собственно сами байты данных 8 штук, но передаваться будет только указанное количество слева на право.
9. Интервал между сообщениями в миллисекундах с шагом, определяемым значением поля «11». От 1*байт «11» (значение байта = 01) до 255*байт «11» (значение байта = FF) миллисекунд.
10. Смещение по времени начала передачи сообщения с заданной периодичностью относительно момента запуска передатчика с шагом, определяемым значением поля «11». От 0 (значение байта 0) до 255*байт «11» мс (значение байта FF).
11. Байт, определяющий временной шаг для настроек периода «9» и смещения «10». Значение от 1 до 255 мс. Значение 0 не определено.
12. Байт настройки скорости CAN шины. Возможные значения байта:
0 — скорость 50 кБит/с
1 — скорость 100 кБит/с
2 — скорость 125 кБит/с
3 — скорость 250 кБит/с
4 — скорость 500 кБит/с
Пример передачи пакета сообщений:
Временной шаг принимаем 2 мс (значение байта 11 равно 2). Например, есть два сообщения с заданным интервалом передачи 40 мс (значение байта 9 равно 20 (0×14). Для сообщения A задано смещение 0 мс (значение байта 10 равно 0 (0×00)), а для сообщения B 20 мс (значение байта 10 равно 10 (0×0A)). Тогда после обнаружения на шине передатчиком пакета с ID заданным параметром 2, запустится отсчёт интервалов, и через 40 мс на шину будет передано сообщение A, а ещё через 20 мс — сообщение B, затем через 20 мс снова сообщение A и снова через 20 мс сообщение B. Таким образом, интервал между сообщениями A и между сообщениями B будет 40 мс, а вот между A и B будет 20 мс.
canscanner.com