Как сделать чтобы моторчик в обе стороны крутился – Как поменять вращение на однофазном двигателе
Как поменять вращение на однофазном двигателе
Перед выбором схемы подключения однофазного асинхронного двигателя важно определить, сделать ли реверс. Если для полноценной работы вам часто нужно будет менять направление вращения ротора, то целесообразно организовать реверсирование с использованием кнопочного поста. Если одностороннего вращения вам будет достаточно, то подойдет самая простая схема без возможности переключения. Но что делать, если после подсоединения по ней вы решили, что направление нужно все же поменять?
Постановка задачи
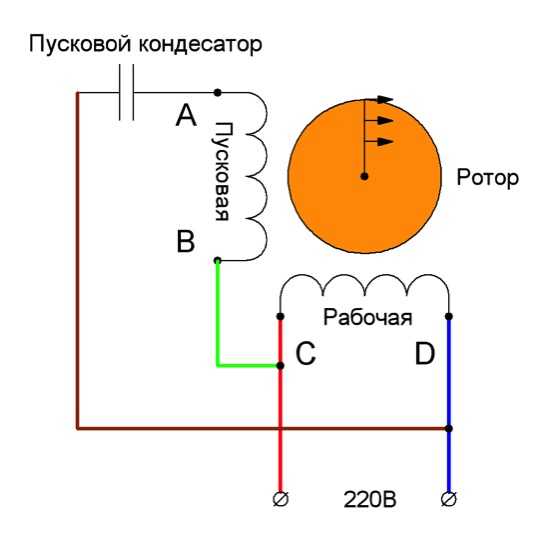
Предположим, что у уже подсоединенного с использованием пускозарядной емкости асинхронного однофазного двигателя изначально вращение вала направлено по часовой стрелке, как на картинке ниже.
Уточним важные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К начальной клемме A подсоединен провод коричневого, а к конечной – зеленого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К начальному контакту подсоединен провод красного, а к конечному – синего цвета.
- Направление вращения ротора обозначено с помощью стрелок.
Ставим перед собой задачу – сделать реверс однофазного двигателя без вскрытия его корпуса так, чтобы ротор начал вращаться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить тремя способами. Рассмотрим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтобы изменить направление вращения двигателя, можно только поменять местами начало и конец рабочей (постоянной включенной) обмотки, как это показано на рисунке. Можно подумать, что для этого придется вскрывать корпус, доставать намотку и переворачивать ее. Этого делать не нужно, потому что достаточно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из них соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Определите, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две линии: фаза и ноль. При отключенном двигателе произведите реверс путем перекидывания фазы с начального контакта намотки на конечный, а нуля – с конечного на начальный. Или наоборот.
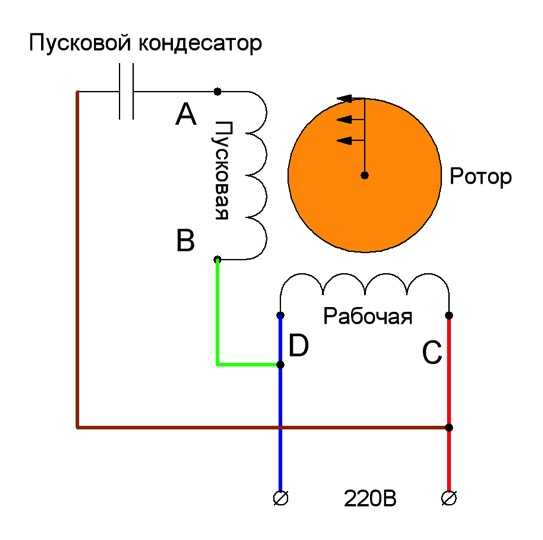
В результате получаем схему, где точки С и D меняются между собой местами. Теперь ротор асинхронного двигателя будет вращаться в другую сторону.
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.
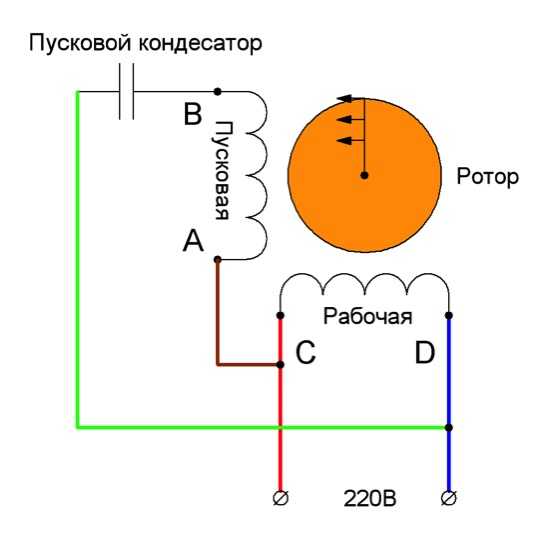
После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.

На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).
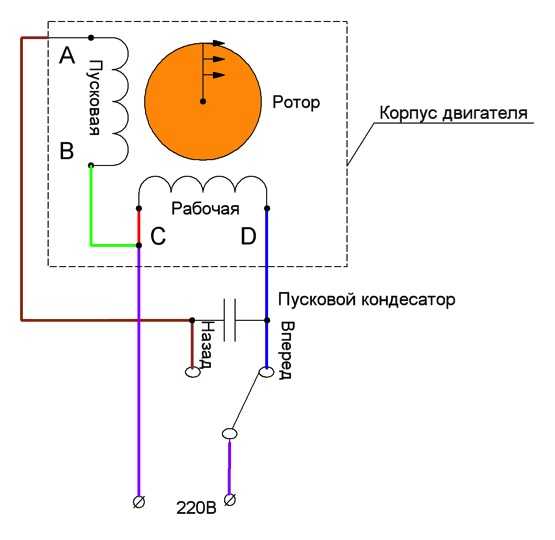
Посмотрите на рисунок выше. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно!
Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.
Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. КПД при этом тоже оставляет желать лучшего.
Осуществить реверс асинхронного мотора 220В просто, если концы обмоток отводятся из корпуса наружу. Сложнее его организовать, когда выводов всего три. Рассмотренный нами третий способ реверсирования подходит только для кратковременного включения двигателя в сеть. Если работа с обратным вращением обещает быть продолжительной, то мы рекомендуем вскрыть коробку для переключения методами, описанными в 1 и 2 варианте: так безопасно для агрегата, и сохраняется КПД.
electricdoma.ru
Реверсирование электродвигателей | Все своими руками
Опубликовал admin | Дата 31 января, 2013Схемы реверсирования двигателей.
Здравствуйте дорогие читатели. Частенько в любительских самодельных устройствах используются различного рода двигатели. В зависимости от предназначения, двигатели в этих устройствах, согласно конструкторскому замыслу должны вращаться в обе стороны. То есть схемы их включения должны предусматривать реверсирование. Самое простой реверс имеют двигатели постоянного тока с возбуждением от постоянных магнитов. Поменял концы проводов питания местами и все – движок вращается в другую сторону. Поэтому и схемы реверсирования для этих двигателей простые. А как быть с другими двигателями? Вот об этом и поговорим.
Двигатель Д5-ТР.
Двигатель с электромагнитным возбуждением. Двигатель имеет разные варианты исполнения и схем включения, но какие бы они не были, нам нужны всего четыре конца – два от статорной обмотки и два от роторной, т.е. от коллекторных щеток.
Для того, чтобы такие двигатели вращались в другую сторону, необходимо, чтобы полярность питающего напряжения на одной из обмоток оставалась постоянной, а полярность другой менялась на противоположную. Схема включения этого, как и любого другого с электромагнитами, показана на рис.1. Здесь постоянную полярность включения имеет статорная обмотка (обмотка возбуждения), что обеспечивается применением выпрямительного моста, а полярность роторной можно менять. Теперь реверс производится так же переполюсовкой напряжения питания.
Двигатель ЭДГ-1.
Двигатель ЭДГ-2.
Двигатель ЭДГ-1 раньше применялся в ЭПУ – электропроигрывающих устройствах. Двигатели типа ЭДГ-2 применялись в магнитофонных приставках. Эти двигатели рассчитаны на работу в сети переменного тока напряжением 127В. Но поменяв схему включения[1] обмоток и фазосдвигающего конденсатора, их можно питать и от сети напряжением 220В. Схема включения двигателей с реверсированием и его управлением показана на рисунке 2. «Лево», «Право» на схеме поставлены для виду. Все зависит от того, как первоначально подключить концы обмоток. Не понравится сторона, в которую первоначально крутится двигатель – перекиньте концы одной из обмоток.
Двигатель АВЕ – 071 – 4С.

Эти двигатели однофазные, асинхронные применялись в стиральных машинах прошлого века и я думаю, что еще переживут и меня с вами. Десятки лет они исправно вертели активатор, стирая белье и еще послужат нашим Самоделкиным. Двигатель имеет четыре вывода от двух обмоток. Одна пусковая, имеющая активное сопротивление 20 ОМ и рабочая с сопротивлением по постоянному току 50 Ом. Схема включения показана на Рис.3.
Двигатель ДАО – ЦУ4.
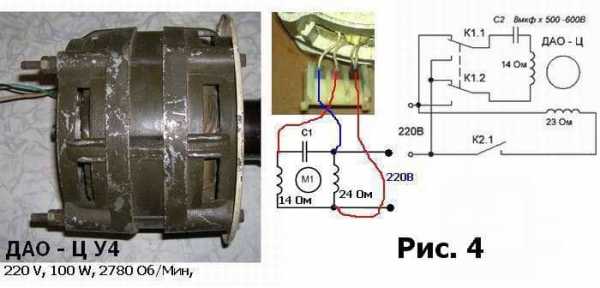
Этот двигун применялся, а может и применяется в стиральных машинах для вращения центрифуги. Для реверсирования этого двигателя придется разобрать выводную колодку и разъединить провода. Получим так же 4 конца от обмоток. Схема включения показана на Рис.4.
Двигатель ДАО-А.

Тоже от стиральных машин. Имеет четыре вывода. Схема включения такая же, как и у предыдущих асинхронных.
Двигатель АОЛБ-22-4 2сер.
————————————————————————————————————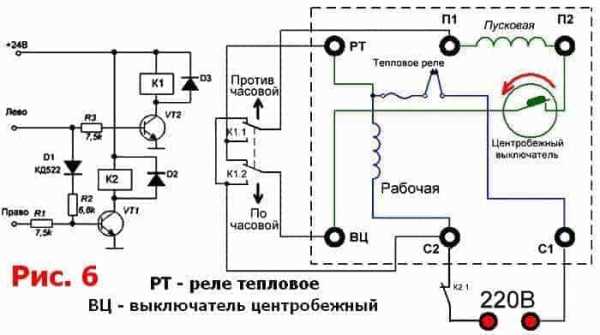
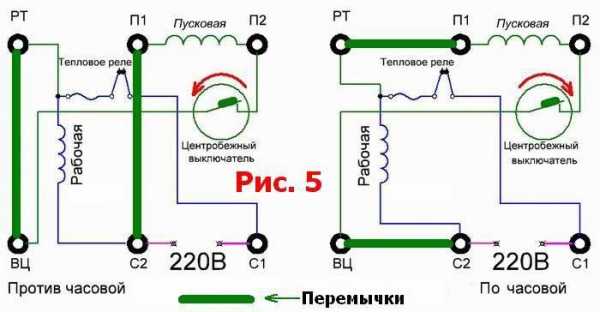
Замечательный двигатель – три в одном. Внутри имеет тепловое реле и центробежный механизм отключения пусковой обмотки. Пришлось с ним повозиться, чтобы вам нарисовать схему наиболее понятно. Установка перемычек показана на рис. 5. Схема реверсирования показана на рис. 6.
Термореле РТ-10.
Термореле РТК-С.

В стиральных машинах применяются тепловые (защитные) реле РТ-10 и пускозащитные реле РТК-С, РТК-1, РТК-1-3, РТК-3-О и др. Тепловое реле типа РТ-10 с одним нормально замкнутым контактом служит для защиты от перегрузок электрических установок и однофазных электродвигателей переменного тока с номинальным напряжением до 220 В. Реле изготовляют на номинальные токи Iн тепловых эле¬ментов 1,2; 1,9; 2,5; 3,3 и 4,3 А. При Iн = 1,1 А реле не срабатывает в течение 30 мин; при Iн = 1,35 А реле срабатывает не более чем через 30 мин; при Iн = 2 А реле срабатывает за 18…60 с. Время самовозврата контактов в замкнутое состояние от 30 с до 10 мин. В реле встроен биметаллический термоэлемент с перекидной пружиной, которая обеспечивает мгновенное размыкание и замыкание контактов. Изоляция реле выдерживает испытательное напряжение 2000 В, приложенное в течение 1 мин. Реле устанавливают в вертикальном положении контакта¬ми вверх, питание подводится к верхнему зажиму. Реле предназначены для работы в закрытых помещениях при температуре окружающей среды от 0 до 70°С. Это довольно эффективна защита. Так что не пренебрегайте ею, а то себе будет дороже. Ну что еще, а пока все. Удачи всем. До свидания. К.В.Ю.
[1] Радио 2004г. № 6 стр.42 Бурков В. «Как подключить двигатель на 127В к сети 220В».
Обсудить эту статью на — форуме «Радиоэлектроника, вопросы и ответы».
Просмотров:101 270
www.kondratev-v.ru
Как управлять мотором постоянного тока
Двигатель постоянного тока
Для начала рассмотрим повнимательней обычный двигатель постоянного тока. Любой двигатель имеет две основные части — ротор и статор. В коллекторном двигателе статор — неподвижная часть, состоит из постоянных магнитов (или в более мощных двигателях электромагнитов). Ротор (якорь) — вращается, совмещён с валом двигателя и состоит из многих катушек (как минимум трех). Коллектор (щёточно-коллекторный узел) отвечает за переключение выводов катушек ротора. Ток в таком двигателе подводится к катушкам ротора через скользящие контакты (или щётки). В один момент времени подключена только одна катушка, она и создаёт момент вращения двигателя за счет проходящего тока.
С точки зрения базовых элементов схемотехники любой двигатель можно представить в виде следующей эквивалентной схемы:
Когда мотор подключён источнику постоянного тока и еще не начал вращаться, то он представляет из себя обычное сопротивление. То есть через него течет ток согласно закону Ома и сопротивлению его обмотки. Преобладает компонента R. Индуктивность начинает влиять когда напряжение не постоянное, например, если мотор питается от ШИМ (PWM) сигнала.
Сопротивление ротора и индуктивность, как правило, очень малы. Его можно померить обычным мультиметром. Небольшие модельные моторы имеют сопротивление 1-10 Ом. Поэтому, при старте мотора (когда он ещё не начал вращаться), ток сильно превышает рабочий ток мотора и если мотор долго будет неподвижен (его заклинило), то такой высокий ток может привести к перегреву мотора и выходу из строя.
Индуктивность катушек ротора пытается поддерживать ток протекающий через обмотки постоянным. Ее влияние заметно только когда напряжение меняется. Когда мотор начинает вращаться, то коллектор начинает переключать катушки ротора, что вызывает изменение напряжения. Индуктивность пытается в эти моменты поддерживать ток протекающий через мотор на постоянном уровне за счет напряжения.
Во время вращения катушки ротора начинают вырабатывать ток (как генератор) — возникает обратная ЭДС. Чем быстрее вращается ротор, тем выше обратная ЭДС возникающая в катушках, а так как она направлена против напряжения питания, то ток потребляемый мотором снижается.
В дальнейшем нам понадобятся следующие выводы:
пока мотор не начал вращаться он является сопротивлением
если приложить к мотору изменяющееся напряжение (например PWM), то индуктивность будет иметь большое влияние, она будет сопротивляться изменению тока через мотор
когда мотор вращается, то он является генератором, и за счет этого потребляемый ток снижается (итоговое напряжение равно V — Vbemf).
Как подключить мотор к МК
В данной статье мы будем разбираться как управлять с помощью МК скоростью и направлением вращения обычным двигателем постоянного тока.
Для того чтобы коллекторный мотор постоянного тока начал вращаться, достаточно подать на него определённое напряжение. Полярность данного напряжения будет определять направление его вращения, а величина напряжения — скорость вращения. Напряжение нельзя менять безгранично. Каждый мотор рассчитан на определённый диапазон напряжений. При повышении напряжения ток через мотор будет расти, и он начнётся перегреваться и может сгореть. На следующем графике некоего мотора хорошо видна взаимосвязь его основных показателей.
Максимальной
мощности (Torque — крутящий момент) мотор
достигает при максимальном токе. И
зависимость тока и момента — линейная.
Максимальной скорости двигатель
достигает при отсутствии нагрузки (на
холостых оборотах), при увеличении
нагрузки скорость вращения падает.
Номинальное рабочее напряжение указано
в паспорте на двигатель и именно для
него и приведён и этот график. Если же
снижать напряжение, то скорость вращения,
и все остальные показатели будут тоже
падать. Как правило, ниже 30-50% от
номинального напряжения мотор перестанет
вращаться. Если же мотор не сможет
прокрутить вал (его заклинило), то по
сути станет сопротивлением и потребляемый
ток достигает максимальной величины,
зависящей от внутреннего сопротивления
его обмоток. Обычный мотор не рассчитан
на работу в таком режиме и может сгореть.
Посмотрим как меняется ток от нагрузки на реальном моторе R380-2580.
Мы
видим, что рабочее напряжение данного
мотора — 12В, потребляемый ток под
нагрузкой — 1.5А. Ток останова мотора
вырастает до 8А, а в холостом же вращении,
потребляемый ток равен всего 0.8А.
Как мы знаем, порт микроконтроллера не может выдать ток больше 50мА, и напряжение питания 12В для него слишком большое. Для управления моторами нам понадобится электронный ключ — транзистор, возьмём обычный биполярный транзистор NPN и подключим его по следующей неправильной схеме.
Чтобы мотор начал вращаться, на базу транзистора необходимо подать небольшой ток, далее транзистор откроется и сможет пропустить через себя гораздо больший ток и напряжение — мотор будет вращаться. Стоит отметить что, если мы соберём такую схему, то транзистор очень скоро, если не сразу, выйдет из строя. Чтобы этого не произошло, его необходимо защитить.
Как мы уже знаем одна из компонент мотора — индуктивность — сопротивляется изменению тока. Поэтому, когда мы закроем транзистор, чтобы выключить мотор, то сопротивление транзистора резко увеличится и он перестанет пропускать через себя ток. Однако индуктивность будет сопротивляться этому, и для того, чтобы удержать ток на прежнем уровне, по закону Ома, напряжение на коллекторе транзистора начнёт резко повышаться (может достигнуть даже 1000В, правда очень на малое время) и транзистор сгорит. Чтобы этого не произошло необходимо параллельно обмоткам мотора поставить диод, который откроет путь для обратного напряжения и замкнёт его на обмотке мотора, тем самым защитит транзистор.
Также, все постоянные моторы имеют еще одну неприятность — при вращении механический контакт в коллекторе не идеален, щётки искрят в процессе работы, создавая помехи, что может привести к сбою микроконтроллера. Чтобы снизить эти помехи, необходимо использовать конденсаторы небольшой ёмкости, подключенный параллельно выводам мотора (как можно ближе к самому мотору). Вот окончательная правильная схема (диод может быть не обязательно Шоттки, но он предпочтителен).
Биполярные транзисторы в открытом состоянии они ведут себя как диоды (на них падает около 0.7 В). А это, в свою очередь, вызывает их большой нагрев на больших токах и снижает КПД схемы управления мотором. Поэтому лучше управлять моторами с помощью полевых (MOSFET) транзисторов. В настоящее время они достаточно распространены и имеют невысокую цену. Их низкое сопротивление в открытом состоянии позволяет коммутировать очень высокие токи с минимальными потерями. Однако и у них есть свои недостатки. Так как MOSFET транзисторы управляются напряжением, а не током (и обычно оно составляет 10В), то нужно или выбирать специальные логические MOSFET, которые могут управляться низким напряжением — 1.8 .. 2.5В или использовать специальные схемы накачки напряжения (драйверы полевых транзисторов). Как выбирать MOSFET под вашу схему мы рассмотрим в других статьях, на конкретных приборах.
Теперь, подавая на выход микроконтроллера логическую единицу, мы заставим мотор вращаться, а логический ноль — остановится. Однако вращаться он будет с постоянной скоростью и только в одну сторону. Хотелось бы иметь возможность менять направление вращения мотора, а также его скорость. Рассмотрим, как этого можно добиться с помощью микроконтроллера.
H-Мост — меняем направление вращения мотора
Для управления направлением вращения мотора существует специальная схема, которая называется H-мост (схема выглядит как буква H).
Работает
схема очень просто. Если открыть верхний
правый и левый нижний транзистор, то на
клемах мотора справа будет плюс, а слева
будет минус. Мотор будет крутиться в
одну сторону. Если открыть левый верхний
и правый нижний, то справа будет минус,
а слева плюс — полярность тока сменится,
и мотор будет крутиться в другую сторону.
Паразитные диоды внутри MOSFET транзисторов
будут защищать всю схему (параметры
этих диодов не очень хорошие и в реальных
схемах могут понадобиться более
быстродействующие диоды Шотке параллельно
паразитным диодам, для снижения нагрева
полевого транзистора), так что лишние
компоненты не понадобятся, кроме
искрогасящего конденсатора.
В схеме H-моста в качестве нижних транзисторов всегда используются N-канальные, а вот верхние могут быть как N-канальные, так и P-канальные. P-канальными транзисторами в верхнем ключе проще управлять, достаточно сделать схему смещения уровня напряжения на затворе. Для этого можно использовать маломощный N-канальный полевой или биполярный транзистор. Нижним транзистором можно управлять напрямую от МК, если выбрать специальный логический полевой транзистор.
Если в вашей схеме будет использоваться высоковольтный мотор постоянного тока (больше 24В) или мощный мотор с токами более 10А, то лучше использовать специальные микросхемы — драйверы MOSFET транзисторов. Драйверы управляются, как правило, сигналами микроконтроллера от 2 до 5В, а на выходе создают напряжение необходимое для полного открытия MOSFET транзисторов — обычно это 10-15В. Также драйверы обеспечивают большой импульсный ток необходимый для ускорения открытия полевых транзисторов. С помощью драйверов легко организовать управление верхним N-канальным транзистором. Очень хорошим драйвером является микросхема L6387D от компании ST. Данная микросхема хороша тем, что не требует диода для схемы накачки напряжения. Вот так она подключается для управления H-мостом на 2-х N-канальных транзисторах.
N-канальные
полевые транзисторы, стоят дешевле
P-канальных, а также имеют меньшее
сопротивление в открытом состоянии,
что позволяет коммутировать большие
токи. Но ими сложнее управлять в верхнем
положении. Проблема использования
N-канального транзистора в верхнем ключе
состоит в том, что для его открытия нужно
подать напряжение 10В относительно
Истока, а как вы видите на схеме там
может быть все напряжение питания
мотора, а не 0 вольт. Таким образом, на
базу необходимо подать 10В + напряжение
питания мотора. Нужна специальная
bootstrap схема для повышения напряжения.
Обычно, для этих целей используется
схема накачки напряжения на конденсаторе
и диоде. Однако такая схема работает
только, если вы постоянно подзаряжаете
конденсатор — открывая, закрывая нижний
транзистор (в ШИМ управлении). Для
возможности поддерживания верхнего
транзистора постоянно открытым нужно
еще усложнять схему — добавлять схему
внешней подпитки конденсатора. Вот
пример схемы управления N-канальными
транзисторами без использования
микросхем драйверов.
Перейдём к управлению скоростью вращения мотора.
ШИМ сигнал — управляем скоростью вращения мотора
Моторы постоянного тока имеют линейную зависимость скорости вращения от приложенного напряжения. Таким образом, чтобы снизить скорость вращения, надо подать меньше напряжения. Но надо помнить, что с падением напряжения, у мотора падает мощность. Поэтому, на практике, можно управлять скоростью мотора только в пределах 30%-50% от полной скорости вращения мотора. Для управления скоростью мотора без потери мощности, необходима обратная связь от мотора по оборотам вращения, например как в электрическом шуруповерте. Такой режим управления, требует более сложной схемы. Мы же будет рассматривать простой вариант — управление скоростью мотора без обратной связи.
Итак, нам необходимо менять напряжение подаваемое на мотор. В нашем распоряжении есть MOSFET транзистор. Мы помним, что наш мотор имеет индуктивность. Индуктивность сопротивляется изменению тока. И если быстро включать и выключать напряжение на моторе, то в момент выключения ток будет продолжать течь благодаря индуктивности. А мотор будет продолжать вращаться по инерции, а не остановится. Но естественно, вращаться он будет медленнее, среднее напряжение на его обмотках будет меньшее.
Микроконтроллер, как раз, отлично умеет генерировать импульсный ШИМ (PWM) сигнал. А мотор умеет интегрировать данный сигнал (усреднять) за счёт индуктивности обмоток и инерции ротора. От коэффициента заполнения (скважности) ШИМ сигнала как раз и будет зависеть полученное мотором среднее напряжение, а значит и скорость.
Какая же частота ШИМ нужна для лучшего управления мотором? Ответ очень простой, чем больше, тем лучше. Минимальная частота зависит от индуктивности мотора, а также массы ротора и нагрузки на вал мотора. Если смоделировать в электрическом симуляторе (например, PROTEUS) ШИМ управление мотором, то будет видно, что чем больше частота ШИМ, тем более ровный ток протекает через мотор (ripple current — снижается при увеличении частоты). Низкая частота:
высокая
частота:
Если же частота упадёт ниже определённого уровня, ток станет разрывным (будет падать до нуля) и в итоге мотор не сможет крутиться.
Отлично, все просто! Делаем частоту ШИМ побольше, например 1 МГц, и любому мотору хватит. В жизни же, все не так просто. Для понимания всех возможных проблем можно упрощенно принять затвор MOSFET транзистора за идеальный конденсатор. Для того чтобы транзистор полностью открылся, конденсатор необходимо зарядить до 10В (на самом деле меньше). Чем больше ток, который мы можем вкачать в конденсатор, тем быстрее он зарядится, а значит быстрее откроется транзистор. В процессе открытия транзистора, ток и напряжение на нем будут максимальными, и чем больше это время, тем сильнее нагреется транзистор. В datasheet обычно есть такой параметр как Qgate — полный заряд, который надо передать транзистору, чтобы он открылся полностью.
Чем меньше эта величина, тем меньшей ток нужен для управления данным транзистором. Естественно, такой ток нужен только на очень короткое время — какое, опять же написано в datasheet — tr, обычно оно измеряется в наносекундах. Чтобы выдать такой ток, нужны специальные драйверы, если же мы управляем логическим MOSFET напрямую от микроконтроллера, то мы не сможем обеспечить такой ток. Поэтому для защиты микроконтроллера необходимо перед базой MOSFET ставить резистор, а это сильно замедляет время открытия. В итоге, микроконтроллер в прямом управлении не может обеспечить более 1-2 мкc на открытие и закрытие транзистора. Время открытия и закрытия должно занимать не более 10% длительности ШИМ сигнала. Таким образом, мы сразу получаем ограничение в частоте — 50 000 Гц. Дополнительно, сам микроконтроллер должен иметь возможность генерировать ШИМ сигнал с возможностью хотя бы 8 битного управления шириной ШИМ (для этого требуется большая рабочая частота МК). В итоге, обеспечить большую частоту ШИМ не так просто. Так же, на высоких частотах, начитает мешать паразитные ёмкости и индуктивности. На плате, которую можно сделать дома, получить частоту ШИМ больше 300 кГц, очень сложно. Трассировка платы должна быть сделана идеально. Для снижения требований к плате, в настоящее время выпускаются специальные MOSFET, объединённые с драйверами управления, они позволяют на заводских, многослойных платах получить частоту управления MOSFET в 2МГц.
Индуктивность моторов не такая уж маленькая, и такие большие частоты не нужны. Для управления моторами постоянного тока вполне достаточно 8 кГц, лучше около 20кГц (за звуковым диапазоном).
Дополнительно стоит отметить, что для снижения стартового тока необходимо плавно поднимать на старте частоту ШИМ. А еще — лучше контролировать стартовый ток мотора с помощью датчиков тока.
ШИМ управление мотором предполагает очень быстрое изменение напряжение от 0 для максимального, что порождает большие проблемы при трассировке платы. Перечислим коротко правила, которые необходимо соблюдать при трассировке платы.
Земли управления моторами и микроконтроллера обязательно должны быть разделены, соединение в одной точке тонким проводником, например 0.3мм, как можно ближе к проводам питания всей схемы
Драйвера управления MOSFET должны быть как можно ближе к самим MOSFET транзисторам
Исполнение управляющей области обязательно двухсторонее, желательно с земляным слоем с одной стороны. При импульсном управлении возникают электромагнитные помехи, чтобы снизить их, земляной слой должен быть рядом.
Обязательно наличие конденсатора как можно ближе к зоне прохождения больших импульсных токов. Если такого конденсатора не будет, то напряжение на линии питания будет сильно проседать и микроконтроллер будет постоянно сбрасываться. Также без такого конденсатора, за счёт индуктивности проводов питания, напряжения на линии питания может увеличиться в несколько раз и компоненты выйдут из строя!
Более подробно мы рассмотрим как работают эти правила на конкретных приборах.
ШИМ сигнал в H-мосте
Чтобы можно было менять направление вращения и скорость — нужна схема H-моста, а для регулирование скорости нужно управлять транзисторами ШИМ сигналом. В схеме H-моста четыре транзистора. Как лучше ими управлять? На какой транзистор подавать ШИМ сигнал? Разберёмся в этом вопросе (рекомендуем прочитать очень подробную статью на эту тему).
Рассмотрим нашу схему с точки зрения нагрева транзисторов. Это один из основных критериев, по которому наш прибор может выйти из строя. Полевой транзистор состоит из двух элементов — собственно транзистор и паразитный диод. В схеме управления мотором оба элемента работают. Нагрев полевого транзистора происходит в следующие моменты времени:
когда транзистор открыт, нагрев идёт из-за сопротивления в открытом состоянии Rdson, пропорционально времени открытия транзистора выделяется мощность P = I * I * Rdson
когда транзистор закрыт, то ток ЭДС мотора идёт через диод, то есть нагрев идет из-за диода P = I * U diode forward (как правило 1В)
когда транзистор переключается из открытого состояния в закрытое, то нагрев пропорционален времени открытия и закрытия транзистора
Посмотрим, как влияет схема управления на нагрев нашим электронных ключей. Допустим, что мы управляем мотором ШИМ сигналом со скважностью 50% и мотор крутится в одну сторону.
Самый простой вариант — применить ШИМ сигнал к одному из двух транзисторов, а второй оставить все время открытым. Обычно, ШИМ в этом случае подаётся на нижний транзистор (N типа), который обычно быстрее. В этом случае нагрев нижнего будет больше верхнего на величину тепла выделяемого при переключениях транзистора. Чтобы сравнять счёт, можно попеременно подавать ШИМ сигнал то на верхний (если они одинаковые), то на нижний транзистор. Также можно подавать ШИМ на оба транзистора одновременно, но из-за разницы в транзисторах это будет не эффективно, а также будет увеличивать нагрев за счёт переключения транзисторов. При такой схеме управления, два других транзистора работают как диоды. К счастью, наибольший ток через диод будет при наибольшей скважности ШИМ, при этом диод будет задействован очень малое время.
Для исключения тока через диоды, которые дают существенный нагрев, можно мотор никогда не отключать от напряжения, а вместо этого, крутить его в обратную сторону. Таким образом, мы должны, например 70% ШИМ сигнала крутить вправо, а 30% влево. Это даст в итоге 70%-30%=40% скорости вправо. Но при этом не будут задействованы диоды. Такой метод управления называется комплиментарным. Такая схема требует большого конденсатора на линии питания, а также источника питания, который может потреблять ток (например аккумулятора).
Вместо вращения мотора в разные стороны, можно помогать диодам — а именно тормозить мотор, открывать два верхних транзистора в момент низкого уровня ШИМ сигнала. На практике, все эти методы не дают существенного изменения скорости вращения двигателя, но позволяют эффективно управлять нагревом полевых транзисторов. Более подробно про особенности различных схем управления можно в этой статье.
На этом мы закончим нашу статью про моторы. Теперь можно перейти к практике — будем делать плату управления 4-мя моторами для робота.
myowndevice.ru
Как сделать двухсторонний концевик. — Паркфлаер
Полгода назад когда я готовился к соревнованиям у меня возникла проблема. Мне нужно было сделать так, чтобы у модели был передний и задний ход. Так вот я хочу рассказать как я справился с этой задачей. В этой статье я хочу рассказать как сделать двухсторонний концевик. Наверное, все знают как сделать обычный концевик, он просто соединяет цепь, а вот как сделать двухсторонний, это уже интересно. Тогда я не знал как его сделать, но думал, что в интернете найдется схема. Но я ошибся. Обыскав весь интернет я так и не нашел того, чего хотел. Методом проб и ошибок я сделал его. Поэтому я хочу написать эту статью. Надеюсь, что она поможет всем, кто в ней нуждается, а остальным, надеюсь, будет интересно.Начнем с того, зачем он нуже. Он нужен для того, чтобы мотор мог крутиться в обе стороны, чтобы непосредственно у модели был передний и задний ход. В принципе нужно 2 тумблера. Нужно припаять провода к тумблерам, как показано на схеме, и припаять к мотору и подсоединить к аккумулятору. Конструкцию концевиков нужно крепко закрепить на подходящем куске трех мм фанеры, а фанеру закрепить на рулевой машинке. Если рулевая машинка не дотягивается до обоих концевиков, нужно отремировать, а если мотор крутится не в ту сторону, в которую вы хотите, просто поменяйте реверс.(концевик 3.3gp)
www.parkflyer.ru
Как изменить направление вращения однофазного асинхронного двигателя
© 2008-2018 — ZIPSTORE.RU Запчасти и компоненты для торгового оборудования
Наш адрес: г. Москва, ул. Полярная, д. 31, стр. 1. Телефон: +7 495 649 16 77 (Skype, ICQ). Режим работы: понедельник — пятница с 9:00 до 18:00; суббота и воскресенье — выходной. Доставка по России, Белоруссии, Украине, Казахстану: Москва, Подольск, Сергиев Посад, Истра, Рязань, Курск, Липецк, Тула, Иваново, Воронеж, Ярославль, Тверь, Смоленск, Калуга, Белгород, Орел, Тамбов, Кострома, Брянск, Красноярск, Норильск, Кемерово, Новокузнецк, Новосибирск, Омск, Барнаул, Иркутск, Братск, Бийск, Улан-Удэ, Томск, Абакан, Чита, Горно-Алтайск, Кызыл, Санкт-Петербург, СПб, Выборг, Вологда, Череповец, Мурманск, Сыктывкар, Ухта, Архангельск, Северодвинск, Великий Новгород, Петрозаводск, Гомель, Гродно, Витебск, Могилев, Брест, Минск, Алма-Ата, Астана, Ереван, Киев, Днепропетровск, Львов, Ташкент, Могилев, Псков, Калининград, Нарьян-Мар, Уфа, Стерлитамак, Самара, Тольятти, Сызрань, Нижний Новгород, Арзамас, Саратов, Энгельс, Пермь, Ижевск, Казань, Набережные Челны, Бугульма, Пенза, Оренбург, Орск, Чебоксары, Новочебоксарск, Ульяновск, Киров, Йошкар-Ола, Саранск, Екатеринбург, Верхняя Пышма, Серов, Челябинск, Магнитогорск, Снежинск, Тюмень, Курган, Нижневартовск, Сургут, Надым, Ростов-на-Дону, Волгодонск, Таганрог, Волгоград, Волжский, Краснодар, Армавир, Астрахань, Майкоп, Владивосток, Уссурийск, Хабаровск, Комсомольск-на-Амуре, Советская Гавань, Южно-Сахалинск, Благовещенск, Петропавловск-Камчатский, Мирный, Ставрополь, Минеральные Воды, Махачкала, Нальчик, Алушта, Армянск, Джанкой, Евпатория, Керчь, Севастополь, Симферополь, Судак, Крым, Феодосия, Ялта. Сайт отвечает на вопросы: Как отремонтировать, настроить, установить оборудование? Где скачать документацию (инструкцию, мануал)? Где посмотреть партномер? Где купить запчасти (запасные части, зип), комплектующие, аксессуары и термоэтикетка, чековая лента для весов, термопринтеров штрих-кода, чековых принтеров? Обслуживание весов, кассовых аппаратов, термопринтеров, терминалов сбора данных, сканеров штрих-кода: каким образом возможно своими силами? Вас интересует наличие, цена, купить запчасти за наличный и безналичный расчет? — сделайте запрос нашим менеджерам. Официальный сайт компании Zipstore.ru.
zipstore.ru
Как Изменить Направление Вращения Двигателя 220в ~ SIS26.RU
Реверсивное подключение однофазового асинхронного мотора своими руками
Перед выбором схемы подключения однофазового асинхронного мотора принципиально найти, сделать ли реверс. Если для настоящей работы для вас нередко необходимо будет поменять направление вращения ротора, то целенаправлено организовать реверсирование с внедрением кнопочного поста. Если однобокого вращения для вас будет довольно, то подойдет самая обычная схема без способности переключения. Но что делать, если после подсоединения по ней вы решили, что направление необходимо все таки поменять?
Постановка задачи
Представим, что у уже подсоединенного с внедрением пускозарядной емкости асинхронного однофазового мотора вначале вращение вала ориентировано по часовой стрелке, как на картинке ниже.
Уточним принципиальные моменты:
- Точкой А отмечено начало пусковой обмотки, а точкой В – ее окончание. К исходной клемме A подсоединен провод кофейного, а к конечной – зеленоватого цвета.
- Точкой С помечено начало рабочей обмотки, а точкой D – ее окончание. К исходному контакту подсоединен провод красноватого, а к конечному – голубого цвета.
- Направление вращения ротора обозначено при помощи стрелок.
Ставим впереди себя задачку – сделать реверс однофазового мотора без вскрытия его корпуса так, чтоб ротор начал крутиться в другую сторону (в данном примере против движения стрелки часов). Ее можно решить 3-мя методами. Разглядим их подробнее.
Вариант 1: переподключение рабочей намотки
Чтоб изменить направление вращения мотора, можно только поменять местами начало и конец рабочей (неизменной включенной) обмотки, как это показано на рисунке. Можно поразмыслить, что для этого придется вскрывать корпус, доставать намотку и крутить ее. Этого делать не надо, так как довольно поработать с контактами снаружи:
- Из корпуса должны выходить четыре провода. 2 из их соответствуют началам рабочей и пусковой намоток, а 2 – их концам. Обусловьте, какая пара принадлежит только рабочей обмотке.
- Вы увидите, что к этой паре подсоединены две полосы: фаза и ноль. При отключенном движке произведите реверс методом перекидывания фазы с исходного контакта намотки на конечный, а нуля – с конечного на исходный. Либо напротив.
В итоге получаем схему, где точки С и D изменяются меж собой местами. Сейчас ротор асинхронного мотора будет крутиться в другую сторону.
КАК ИЗМЕНИТЬ НАПРАВЛЕНИЕ ВРАЩЕНИЕ ВАЛА В ОДНОФАЗНОМ ДВИГАТЕЛЕ
Моторчик взят от бытовой мясорубки. Направление движения нас не устраивало, пришлось его поменять Всю инфо.
Как изменить направление вращения трехфазного асинхронного двигателя?
Разберемся, как просто поменять направление вращения трехфазного двигателя на противоположное.
Вариант 2: переподключение пусковой намотки
Второй способ организовать реверс асинхронного мотора 220 Вольт – поменять местами начало и конец пусковой обмотки. Делается это по аналогии с первым вариантом:
- Из четырех проводов, выходящих из коробки мотора, выясните, какие из них соответствуют отводкам пусковой намотки.
- Изначально конец В пусковой обмотки соединялся с началом С рабочей, а начало А подключалось к пускозарядному конденсатору. Сделать реверс однофазного двигателя можно, подключив емкость к выводу В, а начало С с началом А.
После описанных выше действий получаем схему, как на рисунке выше: точки А и В поменялись местами, значит ротор стал обращаться в противоположную сторону.
Вариант 3: смена пусковой обмотки на рабочую, и наоборот
Организовать реверс однофазного мотора 220В теми способами, что описаны выше, можно только при условии, что из корпуса выходят отводки от обеих обмоток со всеми началами и концами: А, В, С и D. Но часто встречаются моторы, в которых производитель намеренно оставил снаружи только 3 контакта. Этим он обезопасил устройство от различных «самоделок». Но все же выход есть.
На рисунке выше изображена схема такого, «проблемного», мотора. У него выходят из корпуса только три провода. Они помечены коричневым, синим и фиолетовым цветами. Зеленая и красная линии, соответствующие концу В пусковой и началу С рабочей намотки, соединены между собой внутри. Доступ к ним без разборки двигателя мы получить не сможем. Поэтому изменить вращение ротора одним из первых двух вариантов не представляется возможным.
В этом случае поступают так:
- Снимают конденсатор с начального вывода А;
- Подсоединяют его к конечному выводу D;
- От проводов А и D, а также фазы, пускают отводки (можно сделать реверс с использованием ключа).
Посмотрите на рисунок выше. Теперь, если подключить фазу к отводку D, то ротор вращается в одну сторону. Если же фазный провод перекинуть на ветку A, то можно изменить направление вращения в противоположную сторону. Реверс можно осуществлять, вручную разъединяя и соединяя провода. Облегчить работу поможет использование ключа.
Важно! Последний вариант реверсивной схемы подключения асинхронного однофазного мотора неправильный. Его можно использовать, только если соблюдаются условия:
- Длина пусковой и рабочей намоток одинакова;
- Площадь их поперечного сечения соответствует друг другу;
- Эти провода изготовлены из одного и того же материала.
Все эти величины влияют на сопротивление. Оно у обмоток должно быть постоянным. Если вдруг длина или толщина проводов отличаются друг от друга, то после того, как вы организуете реверс, окажется, что сопротивление рабочей намотки станет таким же, как было раньше у пусковой, и наоборот. Это может стать и причиной того, что мотор не сможет запуститься.
Внимание! Даже если длина, толщина и материал обмоток совпадают, работа при измененном направлении вращения ротора не должна быть продолжительной. Это чревато перегревом и выходом из строя двигателя. КПД при этом тоже оставляет желать лучшего.
Осуществить реверс асинхронного мотора 220В просто, если концы обмоток отводятся из корпуса наружу. Сложнее его организовать, когда выводов всего три. Рассмотренный нами третий способ реверсирования подходит только для кратковременного включения двигателя в сеть. Если работа с обратным вращением обещает быть продолжительной, то мы рекомендуем вскрыть коробку для переключения методами, описанными в 1 и 2 варианте: так безопасно для агрегата, и сохраняется КПД.
sis26.ru
Что нужно сделать чтобы вал электродвигателя крутился в другую сторону?
Ваш двигатель в виду своей конструкции не может поменять направление вращения электрическим методом. По этому установите ротор в том положении (переворачивая его на 180 вдоль оси, чтобы получить нужное направление. Нужно было наметить перед разборкой.
Смени полярность. Т. е. поменяй провода местами. Возможно поможет.
Если мотор коллекторный поменяй провода на щетках местами
Подать ток с другой стороны
Разбери и разверни статор на 180 град
Приложи принципиалку!
Может ротор развернул ?
это бесколлекторный, асинхронный двигатель. клеммы вон те не трогал?
Учитывая то что там всего 2 провода — вариант 1: вы статор верх ногами поставили — переверните его, как был.
крышки можно найти уменя побитые
touch.otvet.mail.ru