Датчик скорости вращения вала – Набор инструментов для контроля частоты от НПК ТЕКО в Челябинске
Набор инструментов для контроля частоты от НПК ТЕКО в Челябинске

В рабочей практике происходит множество процессов, которые требуют подсчета частоты вращения или следования объектов. Например, это обязательный контроль частоты вала ленточного транспортера, привода крыльчатки бетономешалки, частоты следования ковшей нории, частоты вращения шестерни коробки передач.
От выполнения этих задач зависит производительность оборудования, поэтому Вы стараетесь выбирать надежные и долговечные инструменты для их решения:
- проверенные опытным путем
- с гарантией качества
- по выгодным, стабильным ценам
- и с возможностью срочной/бесплатной доставки.
В «ТЕКО» Вы получите полный спектр выгод и широкий выбор инструментов для подсчета частоты.
Индуктивные датчики для контроля частоты вращения приводного барабана конвейера
В случае провисания или обрыва конвейерной ленты, нарушается технологический процесс. Этого можно избежать, используя
С помощью подстроечного резистора на датчике устанавливается минимальное пороговое значение частоты вращения приводного барабана (скорости движения ленты). Для того, чтобы датчик не выдал ложный сигнал по причине инерции конвейера, в нем предусмотрена величина задержки срабатывания при первоначальном запуске двигателя для разгона. В типовых датчиках она достигает 9 секунд, при необходимости — регулируется. Диапазон регулируемых частот: 0,1…2,5 Гц; 2…50 Гц
Вариант успешного применения датчика контроля минимальной скорости: контроль исправности грохота. Датчик запрограммирован на определенную частоту прохождения грохота мимо чувствительного элемента. И в случае, если частота меняется, датчик сигнализирует о сбое в работе грохота (из-за обрыва троса, выхода из строя двигателя или другой возможной причины).
Гарантия — 24 месяца
Контроль частоты в специфических условиях, для индивидуальных обстоятельств
При необходимости, любые типы датчиков «ТЕКО» могут выступать в качестве датчиков минимальной скорости: индуктивные, емкостные, оптические и магниточувствительные. Для этого их достаточно подключить к блоку контроля частоты CF1, который контролирует частоту импульсов входного сигнала и формирует сигнал на выходе при достижении частотой установленного порогового значения.
Применение блока позволяет контролировать частоту следования объектов во взрывоопасных средах: в соединении со взрывобезопасными датчиками и блоком сопряжения.
Для контроля объектов в «узких» местах конструкции, где крупногабаритный датчик разместить невозможно, возможно применение миниатюрных датчиков с блоком контроля частоты.
Гарантия — 12 месяцев
Датчики скорости (датчик частоты вращения) на эффекте Холла
Для определения частоты вращения вала в коробках передач и подачи сигнала на тахометр и тахограф мы рекомендуем датчики частоты ВТИЮ.7019 и ВТИЮ.7030.
Контроль частоты вращения механизмов широко востребован для определения скорости движения автотранспорта, мониторинга работы автокрана и для отлаженной работы оборудования, в составе которого присутствуют вращающиеся приводные устройства (от сепаратора до грохота).
Измерение частоты вращения с помощью датчиков «ТЕКО» осуществляется бесконтактно и не влияет на срок службы оборудования.
Датчики частоты ВТИЮ.7019 и ВТИЮ.7030. успешно применяются на автомобилях производства КАМАЗ, МАЗ и других известных производителей.
Гарантия — 24 месяца
Исправность трансмиссии всегда под контролем индуктивных датчиков
Регулярная оценка рабочего состояния трансмиссии позволяет Вам избежать аварий, простоев и непредвиденных ремонтных работ. Специально для наблюдения за частотой вращения элементов трансмиссии предназначен датчик ВТИЮ. 7040. Частота вращения контролируемых элементов может составлять от 0 до 6000 Гц. При необходимости мы разрабатываем датчики под индивидуальные габариты.
Датчик готовится к выпуску.
Контролируйте частоту с помощью фотоэлектрических преобразователей
Определяйте частоту вращающегося объекта с помощью фотоэлектрического преобразователя «ТЕКО» OT NK21A-311P-11-L-F.
Принцип его работы в том, чтобы контролируемый объект или его деталь прерывала световой поток, излучаемый датчиком. Прерывание преобразуется в импульс на выходе датчика, который вы можете использовать для контроля частоты вращающегося диска или любой другой детали, совершающей обороты. Одному пересечению луча соответствует один выходной импульс, формируемый по окончанию прохождения затеняющего предмета.
Гарантия — 24 месяца
Мониторинг аварийных ситуаций с помощью тахометра
Для подсчёта и индикации количества действий в единицу времени, а также для выдачи управляющего сигнала при достижении заданной установки частоты предлагаем использовать тахометр ТХ1 РЗЩ.
Помимо постоянного мониторинга аварийных ситуаций (в системах контроля частоты вращения механизмов) Вы получаете:
- Универсальность/взаимозаменяемость входных портов;
- Функция «Слежение», управляющая выходным реле;
- Непрерывная и динамичная индикация;
- Программируемый коэффициент деления частоты входного сигнала;
- Детектирование направления вращения при использовании двух сигналов;
- Встроенный источник питания.
Гарантия на прибор — 24 месяца
Контроль частоты вращения зубчатого колеса обычным индуктивным датчиком
Задачу контроля частоты вращения зубчатого колеса можно решить с помощью обычного индуктивного датчика. Для этого нужно знать максимальную рабочую частоту оперирования датчика, частоту вращения зубчатого колеса и число его зубьев.
Для правильного определения рабочей частоты датчика необходимо определить частоту воздействия на него зубчатого колеса.
Решение возможно с помощью простой формулы:
m x n / 60= ƒ (Гц)
где m — число зубьев, а n — частота вращения об/мин.
Например, ВТИЮ.1605.
Ту же задачу с помощью индуктивных датчиков «ТЕКО» можно решать в специфических условиях эксплуатации. Например, возможно внедрение индуктивного датчика ISBm WC48S8-31N-1,5-250-LZR14-1H-V в редуктор для контроля частоты вращения вала. Датчик безотказно и долго работает в условиях непрерывной вибрации и попадания брызг масла. Это возможно за счет герметичного и вибростойкого корпуса. Таким образом с помощью индуктивного бесконтактного выключателя Вы предотвращаете вероятность аварии, которая может случиться из-за сбоя в скорости вращения вала.
Гарантия на прибор — 2,5 года
Датчик контроля частоты тягового двигателя — ISBt A27B8
Датчик ISBt A27B8 позволяет определять скорость вращения двигателя. Главное преимущество датчика — в возможности работать с высокой частотой переключения (до 10.000Гц) Именно эта характеристика позволяет использовать его с целью контроля частоты тягового двигателя. Однако, он применим и для контроля частоты других объектов.
Датчик контроля скорости вращения в общепромышленном исполнении
Бесконтактный датчик ВТИЮ.1345/1345-01 предназначен для контроля скорости вращения различных механизмов. Находит применение во взрывобезопасных условиях, где требуется контроль за минимальной скоростью, где есть риск самопроизвольного снижения скорости или проскальзывания. ВТИЮ.1345 может быть использован на цепных конвейерах, ковшовых элеваторах и других видах вращающихся и перемещающихся устройств.
Выключатель минимальной скорости контролирует частоту прохождений определенных металлических объектов перед чувствительным элементом. Если частота меньше установленного значения, значит, скорость снижена. Тогда выключатель изменяет состояние выходных контактов, тем самым отключая исполнительный механизм или включая сигнал тревоги. Пороговое значение скорости, при которой происходит срабатывание датчика, устанавливается регулировкой. 10-ти секундная задержка в момент запуска системы позволяет механизмам вернуться к рабочему режиму.
Корпус ВТИЮ. 1345 вандалоустойчивый.
Гарантия на прибор — 24 месяца
Датчики с увеличенной дальностью и высокой частотой оперирования
Для обнаружения объектов с высокой частотой вращения (например, зубчатой шестерни или других механизмов) используйте индуктивные датчики с повышенной (относительно базовых моделей датчиков) частотой оперирования. Например, частота переключения датчика ISN FC21A-31P-6-LS4 с номинальным зазором в 6 мм составляет 2000 Гц.
Высокая частота оперирования характерна не только для типовых датчиков «ТЕКО», но также для бесконтактных выключателей с увеличенным (относительно базового) расстоянием срабатывания.
Подберите нужные вам варианты датчиков с повышенной частотой оперирования. Например:
Пример встраимаевых датчиков в корпусе М12:
| Типовое исполнение | С повышенной чувствительностью |
| ISB AC21A-31P-2-LZS4 | ISB AC21A-31P-4-LZS4 |
| Номинальный зазор — 2мм | Номинальный зазор — 4мм |
| Частота переключения — 3000 Гц | Частота переключения — 3000 Гц |
Пример невстраиваемых датчиков в корпусе M8:
| Типовое исполнение | С повышенной чувствительностью |
| ISN EC12B-31N-2,5-LS4 | ISN EC14B-31N-4-LS4 |
| Номинальный зазор — 2,5 мм | Номинальный зазор — 4мм |
| Частота переключения — 1300 Гц | Частота переключения — 1300 Гц |
Сделайте заказ или проконсультируйтесь со специалистом отдела продаж
по телефону +7 (351) 729-82-00 или по адресу [email protected]
teko-com.ru
7.11. Датчики скорости вращения
Тахогенератор — это коллекторный генератор постоянного тока, статор которого изготовлен из хорошо стабилизированных постоянных магнитов, обеспечивающих погрешность воспроизведения индукции магнитного поля в зазоре до 0.05%. В этом поле вращается ротор с обмоткой, скорость которого равна измеряемой скорости вращения. В обмотке ротора возбуждается постоянное напряжение, пропорциональное скорости его вращения. Это напряжение через коллектор подается на выходные зажимы. В результате в условиях эксплуатации предельно достижимая погрешность тахогенератора может достигать значения 0.2%.
Принцип работы простейших дискретных датчиков скорости вращения заключается в счете числа оборотов N в единицу времени. Для измерения больших скоростей с удовлетворительной точностью этого достаточно. Однако для измерения малых скоростей с повышенной точностью применяются датчики, у которых частота импульсов на выходе — есть величина, кратная числу оборотов в минуту, а именно . Преобразование частоты в код выполняется с помощью АЦП, описанных ранее в п. 6.2.3.
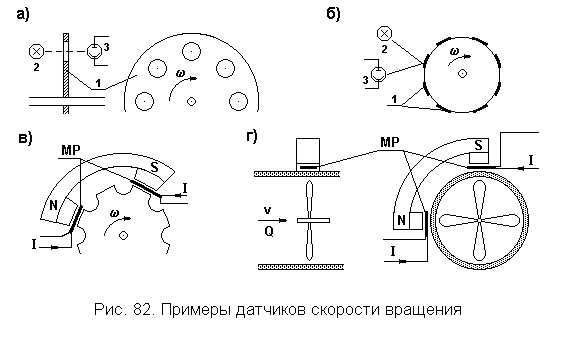
Ввиду многообразия дискретных датчиков скорости вращения приведем лишь отдельные примеры оптических и магниторезистивных датчиков, представленные на рис. 82.
В простейшем оптическом датчике скорости вращения (см. рис. 82 а) используется диск 1 с K отверстиями или прорезями. Этот диск монтируется на вал, скорость вращения которого требуется измерить. По одну сторону диска устанавливается источник света 2, по другую — приемник света 3, в качестве которого может быть использован фотодиод или фототриод. При вращении вала, а вместе с ним и диска свет, попадающий на приемник, прерывается K раз за
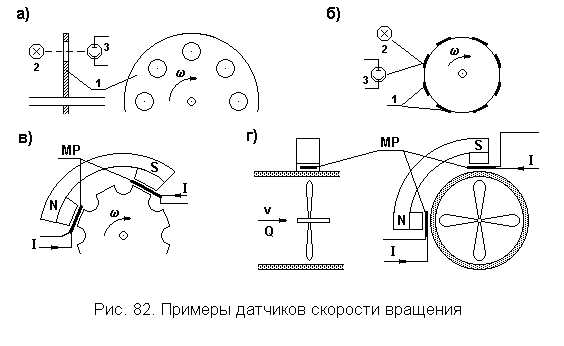
один оборот, и частота следования импульсов от фотоприемника будет равна , гдеN — измеряемая скорость вращения. Эти импульсы от фотоприемника воспринимаются электронной схемой, усиливаются и формируются в виде потока однородных импульсов напряжения или тока.
При невозможности установить на вал подобный диск в датчике скорости вращения может использоваться отраженный свет, как, например, показано на рис. 82 б. На поверхность вала с помощью специальной краски или иного материала параллельно оси вращения с равномерным шагом наносятся K полос 1. Луч света от источника 2 направляется на поверхность вала, а фотоприемник воспринимает отраженный свет. Если вал темный, наносят светлые полосы, если вал отшлифован и хорошо отражает свет, полосы — темные. И в этом случае частота импульсов света, воспринимаемых фотоприемником, также равна , гдеN — измеряемая скорость вращения.
Для применения магниторезистивного датчика скорости вращения на вал устанавливается зубчатое колесо с K зубцами или используется имеющаяся на объекте шестерня из магнитного материала. На некотором расстоянии от этого зубчатого колеса монтируется магнит с полюсными наконечниками так, чтобы расстояние по дуге между ними было кратно шагу зубчатого колеса, как это показано на рис. 82 в. На полюсных наконечниках магнита устанавливаются магниторезисторы, сопротивление которых увеличивается при совпадении зубцов колеса с полюсами магнита. За один оборот колеса или шестерни количество таких совпадений будет равно K. При питании магниторезисторов постоянным током I на нем возникнет K импульсов напряжения, которые затем могут быть усилены, и из них сформируются импульсы одинаковой формы. Частота импульсов равна , гдеN — скорость вращения зубчатого колеса или шестерни.
Аналогичным образом может быть измерена скорость вращения турбинного расходомера, расположенного в трубе (или в специальной вставке) из немагнитного материала. Такой метод можно применять для измерения скорости движения v по трубе или расхода Q горючих жидкостей и газов. Для его реализации в немагнитную вставку или в трубу из немагнитного материала монтируется крыльчатка из магнитного материала с K лопастями. На наружной поверхности трубы устанавливается магнит с полюсными наконечниками и магниторезисторы МР, как показано на рис. 82 г. При движении по трубе жидкости или газа крыльчатка вращается со скоростью, пропорциональной скорости движения среды. Сопротивление тензорезисторов будет изменяться с той же частотой, то есть , гдеN — скорость вращения крыльчатки.
Для измерения экстремально малых скоростей могут быть полезными угловые индуктосины с малым шагом обмоток.
Для применения в многоканальных измерительных информационных системах наиболее удобными датчиками скорости являются тахогенераторы, поскольку их выходной сигнал есть постоянное напряжение, зависящее от измеряемой скорости. Этот сигнал того же вида, что и сигналы в других каналах системы.
203
studfiles.net
Датчики скорости вращения
Поделись с друзьямиНаиболее распространенными датчиками скорости вращения являются аналоговые датчики — тахогенераторы и дискретные датчики — преобразователи скорости вращения в частоту импульсов.
Тахогенератор — это коллекторный генератор постоянного тока, статор которого изготовлен из хорошо стабилизированных постоянных магнитов, обеспечивающих погрешность воспроизведения индукции магнитного поля в зазоре до 0.05%. В этом поле вращается ротор с обмоткой, скорость которого равна измеряемой скорости вращения. В обмотке ротора возбуждается постоянное напряжение, пропорциональное скорости его вращения. Это напряжение через коллектор подается на выходные зажимы. В результате в условиях эксплуатации предельно достижимая погрешность тахогенератора может достигать значения 0.2%.
Принцип работы простейших дискретных датчиков скорости вращения заключается в счете числа оборотов N в единицу времени. Для измерения больших скоростей с удовлетворительной точностью этого достаточно. Однако для измерения малых скоростей с повышенной точностью применяются датчики, у которых частота импульсов на выходе — есть величина, кратная числу оборотов в минуту, а именно . Преобразование частоты в код выполняется с помощью АЦП, описанных ранее в п. 6.2.3.
Ввиду многообразия дискретных датчиков скорости вращения приведем лишь отдельные примеры оптических и магниторезистивных датчиков, представленные на рис. 82.
В простейшем оптическом датчике скорости вращения (см. рис. 82 а) используется диск 1 с K отверстиями или прорезями. Этот диск монтируется на вал, скорость вращения которого требуется измерить. По одну сторону диска устанавливается источник света 2, по другую — приемник света 3, в качестве которого может быть использован фотодиод или фототриод. При вращении вала, а вместе с ним и диска свет, попадающий на приемник, прерывается K раз за
один оборот, и частота следования импульсов от фотоприемника будет равна , где N — измеряемая скорость вращения. Эти импульсы от фотоприемника воспринимаются электронной схемой, усиливаются и формируются в виде потока однородных импульсов напряжения или тока.
При невозможности установить на вал подобный диск в датчике скорости вращения может использоваться отраженный свет, как, например, показано на рис. 82 б. На поверхность вала с помощью специальной краски или иного материала параллельно оси вращения с равномерным шагом наносятся K полос 1. Луч света от источника 2 направляется на поверхность вала, а фотоприемник воспринимает отраженный свет. Если вал темный, наносят светлые полосы, если вал отшлифован и хорошо отражает свет, полосы — темные. И в этом случае частота импульсов света, воспринимаемых фотоприемником, также равна , где N — измеряемая скорость вращения.
Для применения магниторезистивного датчика скорости вращения на вал устанавливается зубчатое колесо с K зубцами или используется имеющаяся на объекте шестерня из магнитного материала. На некотором расстоянии от этого зубчатого колеса монтируется магнит с полюсными наконечниками так, чтобы расстояние по дуге между ними было кратно шагу зубчатого колеса, как это показано на рис. 82 в. На полюсных наконечниках магнита устанавливаются магниторезисторы, сопротивление которых увеличивается при совпадении зубцов колеса с полюсами магнита. За один оборот колеса или шестерни количество таких совпадений будет равно K. При питании магниторезисторов постоянным током I на нем возникнет K импульсов напряжения, которые затем могут быть усилены, и из них сформируются импульсы одинаковой формы. Частота импульсов равна , где N — скорость вращения зубчатого колеса или шестерни.
Аналогичным образом может быть измерена скорость вращения турбинного расходомера, расположенного в трубе (или в специальной вставке) из немагнитного материала. Такой метод можно применять для измерения скорости движения v по трубе или расхода Q горючих жидкостей и газов. Для его реализации в немагнитную вставку или в трубу из немагнитного материала монтируется крыльчатка из магнитного материала с K лопастями. На наружной поверхности трубы устанавливается магнит с полюсными наконечниками и магниторезисторы МР, как показано на рис. 82 г. При движении по трубе жидкости или газа крыльчатка вращается со скоростью, пропорциональной скорости движения среды. Сопротивление тензорезисторов будет изменяться с той же частотой, то есть , где N — скорость вращения крыльчатки.
Для измерения экстремально малых скоростей могут быть полезными угловые индуктосины с малым шагом обмоток.
Для применения в многоканальных измерительных информационных системах наиболее удобными датчиками скорости являются тахогенераторы, поскольку их выходной сигнал есть постоянное напряжение, зависящее от измеряемой скорости. Этот сигнал того же вида, что и сигналы в других каналах системы.
students-library.com
Датчик скорости вращения вала
Датчик предназначен для использования в контрольно-измерительной технике для измерения скорости вращения различного рода валов и механизмов. Датчик содержит индуктор в виде постоянного магнита и систему магнитопроводов, выполненных в виде перекрестно присоединенных к постоянному магниту двух стержней. Полюсные наконечники одного стержня расположены паралелльно-встречно один другому и охвачены сигнальной обмоткой, Модулятор выполнен в виде зубчатого колеса с Z — образным профилем зубьев. Обеспечивается повышение чувствительности и мощности выходного сигнала. 3 ил.
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения скорости вращения различного рода валов и механизмов.
Известен датчик скорости вращения, содержащий индуктор в виде постоянного магнита, укрепленный на контролируемом объекте, Ш-образный магнитопровод с измерительной обмоткой на среднем стержне, который выполнен укороченным и снабжен П-образной магнитопроводящей приставкой, жестко связанной с указанным стержнем и расположенной перпендикулярно основному магнитопроводу (авт. св. СССР N 291147, кл. G 01 P 3/48, 1971). Недостатком этого датчика является относительно малая мощность выходного сигнала и недостаточная чувствительность. Наиболее близким по технической сущности к изобретению является датчик скорости вращения вала, содержащий индуктор, постоянный магнит и систему магнитопроводов с сигнальной обмоткой, система магнитопроводов выполнена в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно один другому и охвачены сигнальной обмоткой (авт. св. СССР N 643805, кл. G 01 P 3/48, 1979, прототип). Однако данный датчик обладает низкой чувствительностью. Результатом изобретения является повышение чувствительности и мощности выходного сигнала датчика. Этот результат достигается тем, что датчик скорости вращения вала, содержащий индуктор в виде постоянного магнита, систему магнитопроводов, выполненную в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно-встречно один другому и охвачены сигнальной обмоткой, а также модулятор, выполненный в виде зубчатого колеса, зубья которого выполнены Z-образного профиля. Такое выполнение датчика позволяет повысить его чувствительность и мощность выходного сигнала. На фиг. 1 схематично показан предлагаемый датчик скорости вращения вала, общий вид; на фиг. 2 и 3 — положение модулятора относительно стержней магнитопровода в процессе работы. Датчик скорости вращения вала (ДСВ) содержит постоянный магнит 1, к которому перекрестно присоединены две пары магнитопроводов в виде стержней 2, 3 и 4, 5, концы которых направлены к модулятору 6. При этом полюсные наконечники одной из пар магнитопроводов (например, 4 и 5) пропущены через сигнальную обмотку 7 в параллельно-встречном направлении. В качестве модулятора могут быть использованы различного рода шестерни, связанные с вращающимися валами. Модулятор 6 выполнен в виде зубчатого венца Z-образного профиля. При этом шаг зубьев равен расстоянию между концами стержней разноименных магнитов. На фиг. 2 и 3 штриховыми окружностями показаны проекции полюсов стержней 2 — 5 магнита 1 на венец модулятора 6. ДСВ работает следующим образом. При вращении модулятора 6 он горизонтальным участком замыкает стержни 3 и 4 магнита 1, а правым угловым участком замыкает стержни 4 и 2. При этом возрастает магнитный поток Ф, образующий два параллельных контура Ф1 и Ф2, показанные пунктиром со стрелками на фиг. 1. I контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 4, полюс S магнита 1. II контур: полюс N магнита 1, стержень 2, модулятор 6, стержень 4, полюс S магнита 1. При дальнейшем повороте модулятора 6 он горизонтальным участком замыкает полюсные наконечники стержней 5 и 2, а левым угловым участком замыкает стержни 3 и 5. При этом возникают два параллельных контура III и IV магнитного потока Ф. III контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 5, полюс S магнита 1. IV контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 5, полюс S магнита 1. Таким образом, в первый период модулятор 6 находится под полюсными наконечниками стержней 2, 3 и 4, магнитный поток проходит через сигнальную обмотку 7 в направлении стрелки Ф1, а при переходе модулятора 6 к полюсным наконечникам стержней 4, 5 и 2, этот поток изменяет направление на обратное, показанное стрелкой Ф2. Магнитный поток меняет свое направление в интервале времени где — полюсное деление модулятора; p — число его полюсов. Другими словами, в сигнальной обмотке 7 будут наводиться импульсы ЭДС положительной и отрицательной полярности соответственно направлению вращения объекта. При изменении направления вращения объекта полярность импульсов изменяется на 180o, что позволяет определить направление вращения объекта. За счет протекания магнитного потока в одном направлении одновременно по двум противоположно расположенным стержням увеличивается поперечное сечение магнитопровода, что снижает его сопротивление и тем самым повышает чувствительность и мощность выходного сигнала датчика.Формула изобретения
Датчик скорости вращения вала, содержащий индуктор в виде постоянного магнита, систему магнитопроводов, выполненную в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно-встречно один другому и охвачены сигнальной обмоткой, а также модулятор, выполненный в виде зубчатого колеса, отличающийся тем, что в нем зубья модулятора выполнены Z-образного профиля.РИСУНКИ
Рисунок 1, Рисунок 2, Рисунок 3findpatent.ru
Датчики частоты вращения двигателя
Применения
Датчики частоты вращения двигателя используются в системах управления двигателем для:
- измерения числа оборотов двигателя
- определения положения коленчатого вала (положение поршня двигателя)
Число оборотов рассчитывается по интервалу между сигналами датчика скорости вращения.
Индуктивные датчики скорости вращения
Рис. Индуктивный датчик скорости вращения (конструкция):
- Постоянный магнит
- Корпус датчика
- Корпус двигателя
- Полюсный контактный штифт
- Обмотка
- Воздушный зазор
- Зубчатое колесо с точкой отсчета
Конструкция и принцип действия Датчик монтируется прямо напротив ферромагнитного зубчатого колеса (поз. 7) с определенным воздушным зазором. Он имеет сердечник из магнитомягкой стали (полюсный контактный штифт, поз. 4) с обмоткой (5). Полюсный контактный штифт соединен с постоянным магнитом (1). Магнитное поле распространяется через полюсный контактный штифт, проходя в зубчатое колесо. Магнитный поток, проходящий через катушку, зависит от того, попадает ли расположение датчика напротив впадины или зуба колеса. Зубец соединяет в пучок магнитный поток рассеяния, исходящий от магнита. Через катушку происходит усиление сетевого потока. Впадина, наоборот, ослабляет магнитный поток. Эти изменения магнитного потока при вращении зубчатого колеса индуцируют в катушке синусоидальное выходное напряжение, пропорциональное скорости изменения и числу оборотов двигателя. Амплитуда переменного напряжения интенсивно возрастает с увеличением числа оборотов (несколько мВ… > 100 В). Достаточная амплитуда присутствует, начиная с минимального числа оборотов от 30 в минуту.
Рис. Сигнал индуктивного датчика скорости вращения двигателя:
- Зуб
- Впадина
- Опорный сигнал
Активные датчики скорости вращения
Активные датчики скорости вращения работают по магнитостатическому принципу. Амплитуда выходного сигнала не зависит от числа оборотов. Благодаря этому можно измерять скорость вращения и при очень низком числе оборотов (квазистатическое определение числа оборотов).
Дифференциальный датчик Холла
На проводящей ток пластинке, по которой вертикально проходит магнитная индукция В, поперечно к направлению тока можно снимать напряжение UH (напряжение Холла), пропорциональное направлению тока.
Рис. Принцип работы дифференциального датчика Холла:
- а Расположение датчика
- b Сигнал датчика Холла
- большая амплитуда при маленьком воздушном зазоре
- маленькая амплитуда при большом воздушном зазоре
- с Выходной сигнал
- Магнит
- Датчик Холла 1
- Датчик Холла 2
- Зубчатое колесо
В дифференциальном датчике Холла магнитное поле вырабатывается постоянным магнитом (поз. 1). Между магнитом и импульсным кольцом (4) находятся два сенсорных элемента Холла (2 и 3). Магнитный поток, который проходит сквозь них, зависит от того, находится ли датчик скорости вращения напротив зубца или паза. Благодаря созданию разности сигналов от обоих датчиков достигается снижение магнитных сигналов возмущения и улучшенное соотношение сигнала/ шума. Боковые поверхности сигнала датчика могут обрабатываться без оцифровывания непосредственно в блоке управления.
Вместо ферромагнитного зубчатого колеса используются также многополюсные колеса. Здесь на немагнитном металлическом носителе установлен намагничивающийся пластик, который попеременно намагничивается. Эти северные и южные полюсы принимают на себя функцию зубцов колеса.
AMR-датчики
Рис. Принцип определения числа оборотов с помощью датчика AMP:
- а Размещение
- в различные моменты времени
- b Сигнал датчика AMP
- с Выходной сигнал
- Импульсное (активное) колесо
- Сенсорный элемент
- Магнит
Электрическое сопротивление магнито-резистивного материала (AMP, анизотропный магниторезистивный) является анизотропным. Это означает, что оно зависит от направления магнитного поля, которое на него воздействует. Это свойство используется в AMP-датчике. Датчик находится между магнитом и импульсным кольцом. Линии поля изменяют свое направление, когда вращается импульсное (активное) колесо. В результате формируется синусоидальное напряжение, которое усиливается в схеме обработки данных и преобразуется в сигнал прямоугольной формы.
GMR-датчики
Усовершенствование активных датчиков скорости вращения отражено в использовании технологии GMR (ГМР) (Giant Magneto-Resistance). По причине высокой чувствительности по сравнению с датчиками AMP здесь возможны большие воздушные зазоры, за счет чего предполагаются использования в трудных сферах применения. Более высокая чувствительность производит меньше шумов фронта сигнала.
В ГМР-датчиках возможны также все двухпроводные порты, используемые ранее в датчиках скорости вращения Холла.
ustroistvo-avtomobilya.ru
датчик скорости вращения вала — патент РФ 2125730
Датчик предназначен для использования в контрольно-измерительной технике для измерения скорости вращения различного рода валов и механизмов. Датчик содержит индуктор в виде постоянного магнита и систему магнитопроводов, выполненных в виде перекрестно присоединенных к постоянному магниту двух стержней. Полюсные наконечники одного стержня расположены паралелльно-встречно один другому и охвачены сигнальной обмоткой, Модулятор выполнен в виде зубчатого колеса с Z — образным профилем зубьев. Обеспечивается повышение чувствительности и мощности выходного сигнала. 3 ил. Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения скорости вращения различного рода валов и механизмов. Известен датчик скорости вращения, содержащий индуктор в виде постоянного магнита, укрепленный на контролируемом объекте, Ш-образный магнитопровод с измерительной обмоткой на среднем стержне, который выполнен укороченным и снабжен П-образной магнитопроводящей приставкой, жестко связанной с указанным стержнем и расположенной перпендикулярно основному магнитопроводу (авт. св. СССР N 291147, кл. G 01 P 3/48, 1971). Недостатком этого датчика является относительно малая мощность выходного сигнала и недостаточная чувствительность. Наиболее близким по технической сущности к изобретению является датчик скорости вращения вала, содержащий индуктор, постоянный магнит и систему магнитопроводов с сигнальной обмоткой, система магнитопроводов выполнена в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно один другому и охвачены сигнальной обмоткой (авт. св. СССР N 643805, кл. G 01 P 3/48, 1979, прототип). Однако данный датчик обладает низкой чувствительностью. Результатом изобретения является повышение чувствительности и мощности выходного сигнала датчика. Этот результат достигается тем, что датчик скорости вращения вала, содержащий индуктор в виде постоянного магнита, систему магнитопроводов, выполненную в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно-встречно один другому и охвачены сигнальной обмоткой, а также модулятор, выполненный в виде зубчатого колеса, зубья которого выполнены Z-образного профиля. Такое выполнение датчика позволяет повысить его чувствительность и мощность выходного сигнала. На фиг. 1 схематично показан предлагаемый датчик скорости вращения вала, общий вид; на фиг. 2 и 3 — положение модулятора относительно стержней магнитопровода в процессе работы. Датчик скорости вращения вала (ДСВ) содержит постоянный магнит 1, к которому перекрестно присоединены две пары магнитопроводов в виде стержней 2, 3 и 4, 5, концы которых направлены к модулятору 6. При этом полюсные наконечники одной из пар магнитопроводов (например, 4 и 5) пропущены через сигнальную обмотку 7 в параллельно-встречном направлении. В качестве модулятора могут быть использованы различного рода шестерни, связанные с вращающимися валами. Модулятор 6 выполнен в виде зубчатого венца Z-образного профиля. При этом шаг зубьев равен расстоянию между концами стержней разноименных магнитов. На фиг. 2 и 3 штриховыми окружностями показаны проекции полюсов стержней 2 — 5 магнита 1 на венец модулятора 6. ДСВ работает следующим образом. При вращении модулятора 6 он горизонтальным участком замыкает стержни 3 и 4 магнита 1, а правым угловым участком замыкает стержни 4 и 2. При этом возрастает магнитный поток Ф, образующий два параллельных контура Ф1 и Ф2, показанные пунктиром со стрелками на фиг. 1. I контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 4, полюс S магнита 1. II контур: полюс N магнита 1, стержень 2, модулятор 6, стержень 4, полюс S магнита 1. При дальнейшем повороте модулятора 6 он горизонтальным участком замыкает полюсные наконечники стержней 5 и 2, а левым угловым участком замыкает стержни 3 и 5. При этом возникают два параллельных контура III и IV магнитного потока Ф. III контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 5, полюс S магнита 1. IV контур: полюс N магнита 1, стержень 3, модулятор 6, стержень 5, полюс S магнита 1. Таким образом, в первый период модулятор 6 находится под полюсными наконечниками стержней 2, 3 и 4, магнитный поток проходит через сигнальную обмотку 7 в направлении стрелки Ф1, а при переходе модулятора 6 к полюсным наконечникам стержней 4, 5 и 2, этот поток изменяет направление на обратное, показанное стрелкой Ф2. Магнитный поток меняет свое направление в интервале временигде — полюсное деление модулятора;
p — число его полюсов. Другими словами, в сигнальной обмотке 7 будут наводиться импульсы ЭДС положительной и отрицательной полярности соответственно направлению вращения объекта. При изменении направления вращения объекта полярность импульсов изменяется на 180o, что позволяет определить направление вращения объекта. За счет протекания магнитного потока в одном направлении одновременно по двум противоположно расположенным стержням увеличивается поперечное сечение магнитопровода, что снижает его сопротивление и тем самым повышает чувствительность и мощность выходного сигнала датчика.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Датчик скорости вращения вала, содержащий индуктор в виде постоянного магнита, систему магнитопроводов, выполненную в виде перекрестно присоединенных к постоянному магниту двух стержней, полюсные наконечники одного из которых расположены параллельно-встречно один другому и охвачены сигнальной обмоткой, а также модулятор, выполненный в виде зубчатого колеса, отличающийся тем, что в нем зубья модулятора выполнены Z-образного профиля.www.freepatent.ru
Датчики скорости вращения для управления приводом (коробки передач)
Применение
Датчики управления приводом снимают показания числа оборотов вала в АТ-, ASG-, DSG- и CVT-приводах. Это показания числа оборотов турбин и приводов в приводах AT с гидродинамическим преобразователем крутящего момента, числа оборотов первичного и вторичного шкива в CVT-приводах и числа оборотов обоих валов и приводного вала в DSG-приводах. При наличии высоких требований к динамике регулирования разгона снимаются показания числа оборотов двигателя, ожидаемые на элементе разгона.
Для оптимизации управления сцеплением и предотвращения отката автомобиля назад может потребоваться датчик для определения направления вращения. Используются как: автономные датчики, так: и модели, интегрированные в электронные модули, которые устанавливаются как: внутри привода, так: и снаружи.
Требования
Датчики числа оборотов привода подвергаются высоким нагрузкам вследствие
- экстремальных температур от -40 до + 150°С;
- агрессивной среды, обусловленной применением трансмиссионного масла;
- высоких механических нагрузок с ускорениями до 30g, а также
- образование металлических частиц вследствие износа деталей в коробке передач.
Эти нагрузки обусловливают высокие требования к электроники, используемой в датчиках. С помощью современной корпусов, не поддающихся воздействию масла, срок службы в трансмиссионном масле может достигать более 15 лет.
Из-за очень компактного исполнения коробок передач обычно невозможно стандартизировать геометрические размеры датчиков. Так, для каждой коробки передач требуются специальные модели датчиков, которые различаются по длине, направлению снятия показаний и монтажному фланцу в интегрированных модульных типах. В автономных датчиках еще одной переменной является положение монтажной втулки и модель штекера.
Рис. Модели датчиков:
- а Нижнее считывание показаний
- b Боковое считывание показаний
- с Наклонное считывание показаний
- Направление считывания показаний
Для реализации всего спектра функциональных требований используются ASIC Холла (Application Specific Integrated Circuit — специализированные интегральные микросхемы) различной степени сложности алгоритмов обработки данных.
Рис. Сложность требований
Если для считывания числа оборотов используется ферромагнитное триггерное колесо или триггерная зона (с зубцами, с насечками или выштамповками) на вращающихся компонентах привода (коробки передач), то магнитное поле, необходимое для работы датчика Холла, создается магнитом с напряжением отрицательного смещения. Он расположен в датчике сразу за специализированной интегральной микросхемой.
Компактные модели коробок передач все больше нуждаются в возможности считывать показания числа оборотов на больших расстояниях (магнитные воздушные зазоры) через вращающиеся немагнитные компоненты или стенку корпуса. Для таких условий эксплуатации используются мультиполюсные кольца (магнитные кольца), в датчике не используется магнит с напряжением отрицательного смещения.
Конструкция
Рис. Датчик Холла с двухпроводным интерфейсом
Специальные интегральные микросхемы Холла, применяющиеся в датчиках скорости вращения привода, в зависимости от магнитного интерфейса фиксируются в держателе в присутствии магнита с напряжением отрицательного смещения или без него, электрический контакт создается посредством сварки, затем микросхемы устанавливаются в корпус, заливаются эпоксидной смолой или — в моделях, которые устанавливаются снаружи привода (коробки передач) — устанавливаются в оболочку, не пропускающую масло, посредством покрытия бесшовной оболочкой на экструдере. Датчик имеет двухпроводной интерфейс, сочетающий в себе оптимальные диагностические способности с минимальным числом электрических соединений. Два разъема служат как для питания интегральных микросхем Холла, так: и для передачи сигнала.
Принцип действия
Дифференциальные датчики Холла разработаны специально для измерения угловой скорости вращения. Датчик содержит два интегрированных элемента Холла, разнесенных на небольшое расстояние. Сигналы от двух элементов Холла алгебраически вычитаются в встроенном дифференциальном усилителе. Одновременно компенсируется большая часть помех.
Разностный сигнал дополнительно усиливается в некоторых типах интегральных схем и только затем преобразуется в цифровой.
При этом формируется сигнал с двумя уровнями тока (стандартно 7 мА при низком уровне и 14 мА при высоком уровне), частота которого соответствует частоте смены зубцов зубчатого колеса и таким образом рассчитывается число оборотов. Обработка сигнала осуществляется в блоке с помощью измерительного резистора Rm, который преобразует ток датчика Is в напряжение сигнала URM.
В целом принцип действия разностной интегральной микросхемы Холла зависит от того, установлен ли датчик на стальном триггерном колесе или мультиполюсном кольце (a и b).
Рис. Принцип действия датчика скорости вращения привода
- а Расположение триггерного кольца
- b Расположение мультиполюсного кольца
- с Разностный сигнал между датчиками Холла R и С
- d Разностный сигнал между датчиками Холла С и L
- е Выходной сигнал для направления вращения вправо
- f Выходной сигнал для направления вращения влево
- Триггерное кольцо
- Датчики Холла L и R (С опционно для определения направления вращения)
- Постоянный магнит (back-bias)
- Мультиполюсное кольцо
- Смещение фаз в зависимости от направления вращения
В некоторых коробках передач реализованы функции, для которых необходимо определение положения «стоп». Для такого использования датчик должен иметь максимально возможную невосприимчивость к изменениям воздушного зазора, обусловленным вибрациями, и вращательным колебаниям триггерного кольца. Свойство датчика — обозначенное как: невосприимчивость к вибрациям — при использовании дифференциальных датчиков, содержащих два интегрированных элемента Холла можно реализовать только очень ограниченно. Благодаря использованию трех датчиков Холла получаем два сдвинутых по фазе разностных сигнала. С их помощью можно определить направление вращения (рис. с..f) и повысить невосприимчивости к вибрациям.
Стандартные параметры датчиков «Value» (обычные датчики) и «High feature» (улучшенные датчики) отличаются величиной воздушного зазора (максимальное расстояние от датчика до зубчатого колеса), диапазоном частоты сигнала (оборотов колеса) и встроенными дополнительными функциями.
Таблица. Параметры
Сложность конфигурации привода, ограничения монтажного пространства, включая все конструкционные краевые условия и функциональные требования, вынуждают к использованию нестандартных вариантов решений. Для них характерны комбинации интегральных микросхем, варианта корпуса, механических и магнитных интерфейсов датчика, разработанных под конкретные системные требования.
ustroistvo-avtomobilya.ru