Барометрический датчик – Volkswagen Passat 2.5 USA › Бортжурнал › Нужна помощь или датчик барометрического давления часть 2
Датчики барометрического давления
Датчики барометрического давления используются в системах управления двигателем при определении массы топлива по объемному расходу воздуха. Этот способ оказывается намного проще и дешевле в реализации, если сравнивать с непосредственным измерением массового расхода воздуха, но точность резко снижается. Датчики барометрического давления могут использоваться только для диагностики в бортовых диагностических системах второго поколения OBD-II.
Датчики барометрического (атмосферного) давления нужны для адаптации электронных блоков управления к перепадам высоты и изменениям погоды. Они могут применяться совместно с расходомером воздуха по объему. Скорее всего это один и тот же датчик, тогда измерение атмосферного давления производится, когда зажигание включено, а двигатель еще не работает. При езде в горных местах иногда приходится специально останавливаться для того, чтобы перезапустить двигатель, что позволит адаптировать систему управления подачей топлива к новой высоте.
Выпускаются и сдвоенные датчики (рис). Вход барометрического датчика остается открытым и на него подается атмосферное давление, вход датчика разрежения соединяется вакуумным шлангом с впускным коллектором.
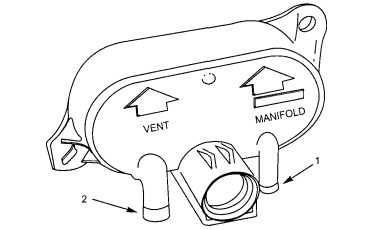
Рис. 2.2. Комбинированный датчик барометрического давления и разрежения:
1. Вакуумный шланг;
2. Шланг в атмосферу;
Рис. 2.3. Современный интегральный датчик давления в защитном корпусе
Барометрические датчики и датчики давления, применяемые для измерения разрежения во впускном трубопроводе, могут быть различных конструкций. Датчики давления дискретного действия представляют собой устройство, где замыкание и размыкание контактов происходят под действием упругой мембраны, испытывающей измеряемое давление.
Датчики давления непрерывного действия представляют собой либо потенциометр, ползунок которого связан с мембраной, либо катушку индуктивности, в которую мембрана под действием давления вдвигает магнитный сердечник.
Современные интегральные датчики (рис.) подключаются к микропроцессору ЭБУ через коммутатор и аналого-цифровой преобразователь (АЦП). Для 8-разрядного контроллера шаг дискретизации может составлять до 4 мс, для 16-разрядного — до 2 мс.
Погрешность датчика абсолютного давления во впускном коллекторе обычно около 1%.
Датчик барометрического давления работает в диапазоне 60… 115 кПа, имеет погрешность около 1,5%. По краям рабочего диапазона, как по температуре, так и по давлению, погрешность растет.
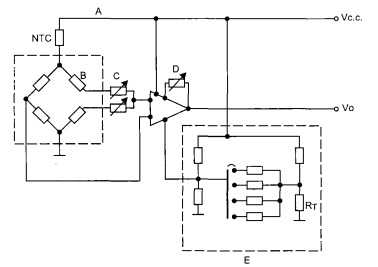
Рис. 2.4. Упрощенная электрическая схема датчика абсолютного атмосферного давления с цепями компенсации: (А — цепь температурной компенсации, В — измерительный мост, С — подстройка нуля,
Датчики абсолютного давления в двигателях с наддувом работают в диапазоне давлений 20…200 кПа.
Рассмотренные датчики имеют, как правило, интегральное исполнение и крепятся к стенкам соответствующих трубопроводов.
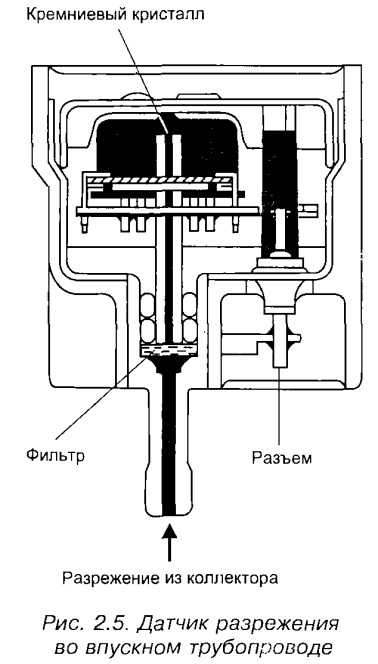
Широкое распространение получили полупроводниковые датчики с преобразователем давления на кремниевом кристалле, в работе которого используется пьезорезистивный эффект (рис. 2.4, 2.5). На поверхности кристалла сформирован мостик сопротивлений, ток через которые изменяется под действием деформации. Затем ток усиливается и вводится температурная компенсация. Эти датчики отличаются небольшими размерами и высокой надежностью. Интегральные датчики очень технологичны, их выходной сигнал унифицирован для подключения к аналоговым или импульсным входам микроконтроллера.
Информацию о давлении в зависимости от конструкции датчика несет величина выходного напряжения или его частота.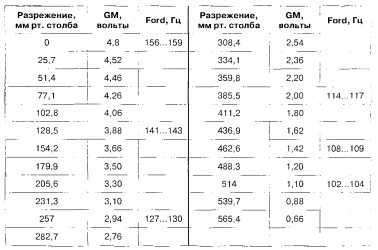
Характеристики датчиков абсолютного давления
www.autoezda.com
DPS310 — цифровой барометрический датчик давления
Новый цифровой датчик давления Infineon DPS310 способен измерять атмосферное давление с высокой точностью, что позволяет использовать его в высотомерах с разрешающей способностью до 5 сантиметров. DPS310 выдает также значение температуры с погрешностью не более ± 0,5 ° C, что делает его отличным кандидатом для измерительного блока метеостанции. Благодаря очень низкому потребляемому току 1,7 мкА и миниатюрным размера микросхему можно применять в портативной батарейной аппаратуре.
Чувствительный элемент датчика использует емкостной принцип измерения, который гарантирует высокую точность при изменениях температуры в широких пределах. Внутренний сигнальный процессор преобразует выходной сигнал от сенсоров давления и температуры в цифровой код с разрядностью до 24 бит. Каждая микросхема DP310 индивидуально калибруется, и персональные коэффициенты, рассчитанные в ходе этого процесса, сохраняются в энергонезависимой памяти.Калибровочные данные используются в приложении для преобразования результатов измерений в значения температуры и давления с высокой точностью.
Буфер выходных данных FIFO может хранить до 32 результатов измерений, что позволяет понизить скорость опроса датчика хост-процессором. Результаты измерения и калибровочные коэффициенты доступны через последовательный интерфейс I2C или SPI. Работу датчика можно контролировать через биты состояния или использовать сигнал прерывания, который может выдаваться на линию SDO.
Особенности DPSЗ10
• Рабочий диапазон: Давление: 300 — 1200 гПа. Температура: -40 — 85 °C
• Точность
• Относительная погрешность: ± 0,06 гПа (или ± 0,5 м)
• Абсолютная погрешность: ± 1 гПа (или ± 8 м)
• Точность измерения температуры: ± 0,5 ° C
• Температурная чувствительность по измерению давления: 0.5Pa / K
• Время измерения: Типичное значение: 27,6 мс для стандартного режима (16x). Минимум: 3.6 мс для режима низкой точности
• Среднее потребление тока: 1,7 мкА для измерения давления, 1.5uA для измерения температуры (@ частота дискретизации 1 Гц), в режиме ожидания: 0,5 мкА
• Напряжение питания: VDD: 1,7 — 3,6 В; VDDIO: 1,2 — 3,6 В
• Режимы работы: Командный (ручной), Фоновый (автоматический), Режим ожидания
• Калибровка: Индивидуально калибруется с сохранением коэффициентов для коррекции измерений
•
• Интерфейс: I2C и SPI (оба с возможностью прерывания)
• Корпус: 8-контактный разъем LGA, 2,0 мм х 2,5 мм х 1,0 мм.
•••
Наши информационные каналы
www.compel.ru
1.4. Электромеханические барометрические датчики высоты и корректоры высоты
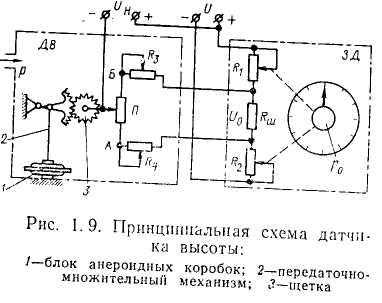
Рис.1.7. принципиальная схема датчика высоты.
1-блок анероидных коробок, 2-передаточно-множительный механизм, 3-щетка.
Некоторые автоматические устройства на самолете нуждаются в получении входного сигнала (текущее значение высоты полета) в виде электрического напряжения. Для этих целей применяют датчики высоты. Принципиальная схема датчика высоты типа ДВ-ЗО, созданного на базе механического высотомера, приведена на рис. 1.7. В герметичный корпус датчика ДВ через штуцер подается воздух из системы статического давления. Перемещение подвижного центра блока анероидных коробок 1 с помощью передаточно-множительного механизма 2 вызывает поворот щетки 3 потенциометра П, с которого снимается напряжение Uн, пропорциональное высоте полета. Реостаты R4 и R3 служат для регулировки схемы.
В приборе ДВ-ЗО значение давления у земли вводится вручную от блока задатчика давления ЗД поворотом рукоятки р0 в центре шкалы и контролируется по указанию стрелки в пределах 640—780 мм рт. ст. При этом щетки реостатов R1 и R2, включенные последовательно с резистором Rш к источнику постоянного тока напряжением 27 В, не меняя величину падения напряжения Ua на резисторе Rш, сдвигают на равную величину потенциалы точек
Датчики высоты типа ДВ-15 регулируются на неизменное давление ро = 760 мм рт. ст. На оси щетки потенциометра укреплена стрелка, которая по шкале указывает значение абсолютной барометрической высоты полета.
Разновидностью датчиков высоты являются корректоры высоты (например, KB-11), которые выдают сигнал, пропорциональный отклонению высоты от заданного значения, и сигнализаторы высоты, выдающие электрический сигнал при достижении заданной высоты полета, например корректор высоты КВ-11, который широко применяется на самолетах и вертолетах гражданской авиации. Он входит в комплект многих автопилотов. Схема прибора изображена на рисунке 1.8а.
В основу работы корректора высоты положена следящая система на переменном токе. Чувствительным элементом корректора высоты является блок анероидных коробок БАК, помещенный в герметичный корпус. Внутренняя полость корпуса сообщается с системой статического давления самолета
При изменении высоты полета перемещается свободный центр анероидных коробок. Это перемещение передается на сигнальную обмотку СО индукционного датчика ИД.
В сигнальной обмотке возникает напряжение, величина которого пропорциональна перемещению, а фаза зависит от напряжения перемещения. Напряжение рассогласования с сигнальной обмотки поступает па величина которого пропорциональна перемещению, а фаза зависит от направления перемещения.усилитель, а затем на управляющую обмотку электродвигателя Д. Двигатель через редуктор перемещает обмотку возбуждения ОВ в такое положение, при котором сигнальная обмотка оказывается в среднем положении по отношению к обмотке возбуждения. При этом напряжение сигнальной обмотки становится равным нулю. Так работает корректор высоты, когда электромагнитная муфта ЭММ обесточена. В этом случае щетка потенциометра П удерживается пружинами в среднем положении и напряжение с него не снимается
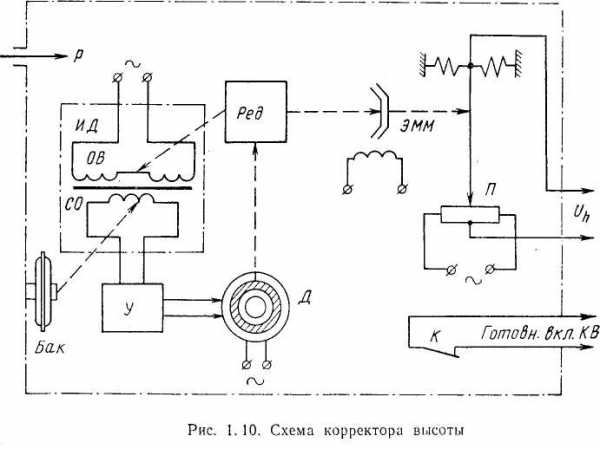
Рис.1.8а.Схема корректора высоты.
При включении корректора высоты срабатывает электромагнитная муфта, и щетка потенциометра механически соединяется с выходным валом редуктора. В этом случае при отклонении самолета от заданной высоты, на которой был включен корректор высоты, с потенциометра снимается напряжение Uh, пропорциональное отклонению h высоты от заданной.
При отключении корректора высоты (выключение питания электромагнитной муфты ЭММ) пружины возвращают щетку потенциометра в среднее (исходное) положение. В приборе предусмотрены контакты К, которые включены в систему сигнализации о совмещении щетки потенциометра со средней его точкой (сигнализация готовности корректора высоты к включению).
В целях обеспечения безопасности полетов каждому самолету устанавливается определенный эшелон заданной высоты, отсчитываемый относительно уровня с p0 = 101 325 Па. Эшелоны высот двух летящих навстречу самолетов выбираются с учетом регламентированной минимальной ширины зоны безопасности, погрешностей высотомеров обоих самолетов, удвоенной аэродинамической погрешности восприятия статического давления, удвоенной погрешности стабилизации заданной высоты.
Получение
сигнала, пропорционального отклонению
самолета от заданной
высоты, возможно с помощью
корректоров высоты (рис.
1.8б). В сервопривод руля высоты
СПРВ вместе с сигналами  и
Uw2)
, пропорциональными
и
Uw2)
, пропорциональными
отклонению угла тангажа и угло-
вой скорости wz относительно поперечной оси самолета, от коррек-

Рис. 1.8б. Схема использования корректора KB-11 в автопилоте АП-28-11
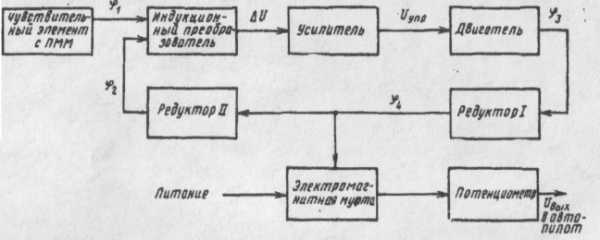
Рис. 1.8в. Функциональная схема корректора высоты типа KB
тора
высоты подается сигнал  ,
пропорциональный отклонению от заданной
высоты. Суммарное отклонение брв руля высоты определяется
в этом режиме сигналами U
,
пропорциональный отклонению от заданной
высоты. Суммарное отклонение брв руля высоты определяется
в этом режиме сигналами U ,
Uwz, U
,
Uwz, U H.
H.
Применяемые в настоящее время корректоры высоты делят на корректоры высоты типа KB и корректоры-задатчики высоты типа КЗВ.
Корректор
высоты типа КВ. Функциональная схема
корректора представлена на рис. 1.8б. При
изменении высоты перемещение жестких
центров УЧЭ (анероидных коробок) через
ПММ (система тяг с зубчатой
парой) передается в виде угла поворота  1 на подвижную вторичную
обмотку индукционного преобразователя.
Первичная обмотка индукционного
преобразователя с помощью двигателя и
редукторов /
и // поворачивается относительно вторичной
обмотки. При отклонении
самолета от заданной высоты на величину
1 на подвижную вторичную
обмотку индукционного преобразователя.
Первичная обмотка индукционного
преобразователя с помощью двигателя и
редукторов /
и // поворачивается относительно вторичной
обмотки. При отклонении
самолета от заданной высоты на величину  H
сигнал
H
сигнал  U
пропорциональный
этому отклонению, с фазой, соответствующей
знаку отклонения,
поступает на вход усилителя. С выхода
усилителя сигнал Uупр
поступает на управляющие обмотки
электродвигателя, который через
два редуктора поворачивает на угол
U
пропорциональный
этому отклонению, с фазой, соответствующей
знаку отклонения,
поступает на вход усилителя. С выхода
усилителя сигнал Uупр
поступает на управляющие обмотки
электродвигателя, который через
два редуктора поворачивает на угол  2 первичную обмотку индукционного
преобразователя до отработки угла
рассогласования (до равенства
2 первичную обмотку индукционного
преобразователя до отработки угла
рассогласования (до равенства  1=
1= 2).
2).
В
работе корректора типа KB
различают режимы согласования и
коррекции.
В режиме согласования электромагнитная
муфта отключена,
центрирующие пружины удерживают щетку
потенциометра на средней
нулевой точке, и поэтому выходной сигнал
корректора отсутствует.
Включением муфты в режиме коррекции
обеспечивается передача угла поворота  4 выходной оси редуктора 1 щетке
потенциометра, выходной сигнал Uвых которого пропорционален по величине и
фазе отклонению
высоты от заданного значения. При
выключении муфты пружины возвращают
щетку потенциометра в среднее (нулевое)
положение.
4 выходной оси редуктора 1 щетке
потенциометра, выходной сигнал Uвых которого пропорционален по величине и
фазе отклонению
высоты от заданного значения. При
выключении муфты пружины возвращают
щетку потенциометра в среднее (нулевое)
положение.
В электрической схеме корректора высоты (рис. 1.8г) полупроводниковый усилитель следящей системы двухкаскадный с трансформаторной связью между каскадами. Первый каскад на базе транзистора VI
является каскадом усиления напряжения. Второй каскад собран по двухтактной схеме на транзисторах V2, V3 и является каскадом усиления мощности. Нагрузкой его служат управляющие обмотки электродвигателя М (ДИД-0,5). Выходной сигнал корректора высоты снимается с потенциометра ПКВ. Контакт НК сигнализатора готовности размыкается при смещении щетки потенциометра ПКВ от среднего (нулевого) положения. На схеме показаны цепи подключения индукционного преобразователя ИП и электромагнитной муфты ЭМ, а также штепсельный разъем ШР, с помощью которого осуществляется съем выходных сигналов.
Конструктивно корректор высоты типа KB состоит из четырех узлов: полупроводникового усилителя на плате, электродвигателя с редуктором, электромагнитной муфты с потенциометром и чувствительного элемента с индукционным преобразователем. Все узлы крепятся на одном основании и закрываются кожухом.
Корректор-задатчик
высоты типа КВ. Он предназначен для
выдачи
сигналов в виде напряжений постоянного
и переменного тока частотой
400 Гц, пропорциональных отклонению  Н
самолета от задан-
Н
самолета от задан-
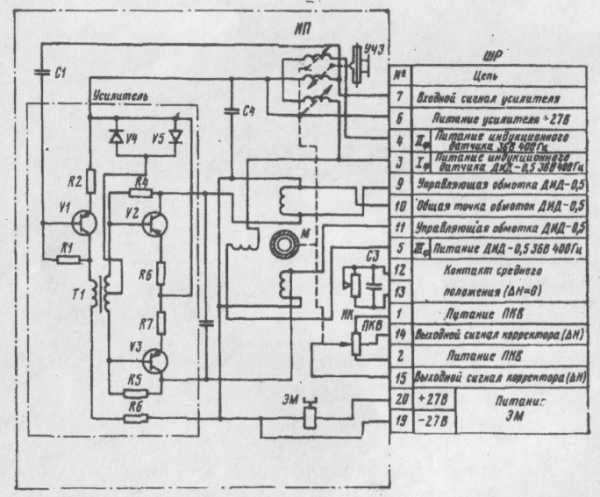
Рис. 1.8г. Принципиальная электрическая схема корректора высоты типа KB
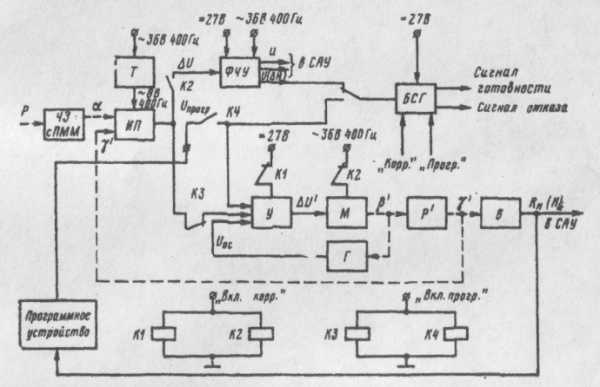
Рис. 1.8д. Функциональная схема корректора-задатчика высоты типа КЗВ
ной высоты полета (в режимах коррекции и работы от программного устройства) и относительного сопротивления, пропорционального абсолютной высоте полета (в режиме обнуления).
Корректор типа КЗВ работает в комплекте с блоком сигнала готовности БСГ, предназначенным для выдачи сигнала готовности к включению в режиме обнуления и выдачи сигналов исправности или отказа в режимах коррекции и программного управления. В блок БСГ вводятся: выходное напряжение переменного тока частотой 400 Гц с корректора, управляющие сигналы + 27 В при включении в режимы коррекции и работы с программным устройством.
На функциональной схеме корректора типа КЗВ (рис. 1.8д) показаны: чувствительный элемент ЧЭ с ПММ; индукционный преобразователь ИП; трансформатор Т, фазочувствительный усилитель ФЧУ, полупроводниковый усилитель У, двигатель М, генератор скоростной обратной связи Г, редуктор Р; узел потенциометров В; блок БСГ; реле К1 и К2, включающие режим коррекции; реле КЗ и К4, включающие режим «Программа».
В
каналах взаимосвязей обозначены: угол
поворота  выходнойоси ПММ, напряжения и переменного
и U постоянного
тока, пропорциональные
изменению высоты Н; усиленное напряжение
рассогласования
выходнойоси ПММ, напряжения и переменного
и U постоянного
тока, пропорциональные
изменению высоты Н; усиленное напряжение
рассогласования  U’;
угол у’ поворота редуктора; угол
U’;
угол у’ поворота редуктора; угол  ‘
поворота вала двигателя;
выходное сопротивление Rn потенциометра В; команда
в виде
напряжения постоянного тока Uпрогр с программного устройства.
‘
поворота вала двигателя;
выходное сопротивление Rn потенциометра В; команда
в виде
напряжения постоянного тока Uпрогр с программного устройства.
Режим
обнуления является подготовительным
для включения корректора
в режим коррекции. Входное давление р воспринимается ЧЭ. Элемент ИП преобразует
перемещение жесткого центра ЧЭ в
напряжение  U,
которое после усилителя У поступает
на управляющую обмотку
двигателя М. Двигатель
через редуктор Р’ поворачивает
щетки узла
потенциометров В. Выходное сопротивление
Rн будет пропорционально
высоте H.
Одновременно двигатель через редуктор Р’ поворачивает
сердечник ИП, пока
напряжение U
не станет равным нулю. Двигатель М остановится.
U,
которое после усилителя У поступает
на управляющую обмотку
двигателя М. Двигатель
через редуктор Р’ поворачивает
щетки узла
потенциометров В. Выходное сопротивление
Rн будет пропорционально
высоте H.
Одновременно двигатель через редуктор Р’ поворачивает
сердечник ИП, пока
напряжение U
не станет равным нулю. Двигатель М остановится.
В
режим коррекции корректор КЗВ включается
оператором или программным
устройством после того, как достигнута
высота стабилизации.
В этом режиме питание элементов У и М
отключается с помощью реле K1
и К2. Сигнал
рассогласования  U
не обнуляется и существует, пока не
будет достигнуто стабилизируемое
значение высоты. Этот сигнал подается
на усилитель ФЧУ, который
выдает потребителям
сигналы в виде напряжений Uи
u.
U
не обнуляется и существует, пока не
будет достигнуто стабилизируемое
значение высоты. Этот сигнал подается
на усилитель ФЧУ, который
выдает потребителям
сигналы в виде напряжений Uи
u.
В режиме работы от программного устройства корректор КЗВ позволяет доводить высоту полета до высоты, заданной специальной программой. Это достигается отработкой положения сердечника ИП механизмом корректора в соответствии с программой. Реле КЗ и К4 отключают элемент ИП от усилителя У и подключают программное устройство. Потенциометр программного устройства (на схеме не показан) совместно с потенциометром В образуют мостовую схему, выходной сигнал с которой поступает на усилитель У.
Чувствительным
элементом корректора типа КЗВ (рис.
1.8е) является анероидная коробка с
линейной зависимостью деформации от
высоты.
Подвижной жесткий центр O1 коробки через термокомпенсатор БМ и
тяги T1 и Т2 взаимодействует
с якорем Я индукционного преобразователя ИП. Сердечник
преобразователя представляет собой
Ш-образный магнитопровод. Обмотка
возбуждения 0В размещена
на среднем
стержне сердечника, встречно включенные
вторичные обмотки ВО
— на
крайних стержнях. Ось 02 якоря и сердечник С преобразователя ИП неподвижно
укреплены на основании К, к
которому жестко
крепится червячная шестерня ЧШ с
центром вращения 03.
Биметаллическая
скоба БМ осуществляет
термокомпенсацию первого и
второго родов .Двигатель М. служит
для отработки преобразователя ИП в
согласованное
положение, когда зазоры  и
и ,
между якорем Я и сердечником
С будут равны. Усилитель У низкой частоты
трехкаскадный с трансформаторной связью
между каскадами. Первый каскад выполнен
по
схеме эмиттерного повторителя. Второй
и третий каскады выполняются
по двухтактной схеме.
,
между якорем Я и сердечником
С будут равны. Усилитель У низкой частоты
трехкаскадный с трансформаторной связью
между каскадами. Первый каскад выполнен
по
схеме эмиттерного повторителя. Второй
и третий каскады выполняются
по двухтактной схеме.
Усилитель ФЧУ в режиме выдачи сигнала переменного тока двухтактный двухкаскадный с трансформаторным выходом. В режиме выдачи сигнала постоянного тока он представляет собой сочетание двухтактного двух каскадного усилителя с полупроводниковым фазочувст-вительным выпрямителем, снабженным RC-фидером.
В блоке БСГ сигнал переменного тока частотой 400 Гц с выхода корректора поступает в усилитель-реле, где усиливается по двухтактной схеме усиления, выпрямляется, сглаживается емкостным фильтром и в отрицательной полярности поступает на несимметричный триггер с одним устойчивым состоянием, нагруженный на обмотку реле. Когда напряжение достаточно (при неисправности корректора) для опрокидывания триггера, последний перейдет из устойчивого состояния, при котором обмотка реле находилась под током, в неустойчивое. Обмотка реле обесточится и выдаст своей контактной группой сигнал «Отказ».
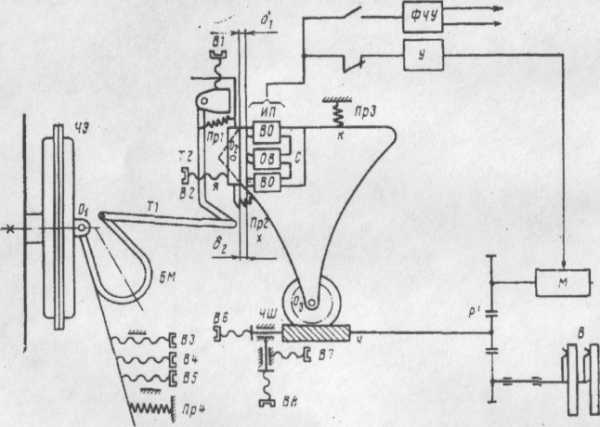
Рис. 1.8е. Кинематическая схема корректора-задатчика высоты типа КЗВ
Конструктивно корректор КЗВ выполнен в виде механизма отработки, закрытого кожухом. В него входит ряд узлов, собранных на платах (ЧЭ с ПММ, ИП, усилитель, червячная пара, трансформатор, потенциометр и т. ст.). Блок БСГ с усилителем-реле выполнен в виде отдельного блока.
Погрешности корректоров высоты. Они аналогичны погрешностям электромеханических высотомеров. При выходе из строя отдельных элементов корректора высоты или обрыве в проводах возникают неисправности. Так, обрыв проводов в индукционном преобразователе ИП или в жгуте, подводящем питание, приводит к отсутствию выходных напряжении корректора. При неисправности реле К1 и К2 (см. рис. 1.8д) подача напряжения Ч-27 В не приводит к включению режима коррекции, а при неисправности реле КЗ и К4 — режима «Программа». Выход из строя усилителя У или двигателя М приводит к неисправности системы отработки корректора. Отказ усилителя-реле блоке БСГ приводит к тому, что в режимах «Коррекция» и «Программa» отсутствует сигнал готовности. Загрязнение штуцера, редуктора или затирание в осях подвижной системы может явиться причиной медленной отработки корректора высоты. При выходе из строя элементы заменяют на исправные.
studfiles.net
Барометрический датчик? | Ford Trucks Club
Тима,в целях просвещения темных масс рассказываю
датчик аабсолютноо давления применяется в автомобилях в 2-х случаях.
1) определение массового расхода воздуха. датчик устанавливается во впускном коллекторе и по разряжению во впускном коллекторе по специальному алгоритму определяется мгновенный расход воздуха. поскольку скорость реакции МАР выше чем у МАF его в этом варианте применяют в основном в спортивных автомобилях, при тюнинге, а также некоторые извращенные автопроизводители на обычных автомобилях.
2)коррекция данных о расходе воздуха по барометрическому давлению. все мы знаем что расход воздуха мериется килограммами. вот. а датчик расхода воздуха мериет его расход литрами и кубометрами. а теперь представим ,что мы едем в гору. высокую. по мере подъема вверх один кубометр воздуха весит все меньше и меньше, меньше и меньше, потому что он все разряженнее и разряженнее…
при этом один литр топлива весит также, как и внизу. таким образом, если условно предположить, что сто кубов воздуха на уровне моря весит 1 кг, то высока в горах он будет весить 600 грамм (в зависимости от того, как мы высока забрались).
таким образом, высоко в горах, не выдерживается стехеометрический состав бензовоздушной смеси 14:1 (14 кг воздуха к 1 кг топлива), поскольку маф считает, что расход воздуха нормальный. а реально состав смеси будет 10:1 или около того. то есть 10 кг воздуха к 1 кг топлива при том же объеме. в результате мы получаем переобогащенную смесь на которой таз не едет.
чтобы этого избежать, в алгоритм работы дрыгателя вводится коррекция показаний расхода воздуха по барометрическому давлению.
то есть абстогируясь от техники предположим что на уровне моря маф показвает на холостых 500 литров воздуха в час. мап показывает давление 760 мм рт. ст.
заносим машин на гору. холостые. мап показывает расход 500л час. маф давление 600 мм рт ст. видя это безобразие, мап говорит мозгу — «Мозг! есть мнение, что показания расхода воздуха нада корректировать, иба давление сильна низкае и маторгчег может заглохнуть, а наше прокладко будет бегать вакруг машины и очень сильна ругаццо»
могзг подумав говорит «да, пожалуй наш коллега МАФ немного не прав в интерпретации окружающей действительности и ввиду темности сознания своего вводит в заблуждение других уважаемых коллег, что в нынешней сложной экономической и геополитической ситуации крайне не политкорректно».
путем не сложных умозаключений мозг умножает для себя показания МАФ на допустим 0.8 и говорит форсункам «уважаемые коллеги! руководству, то есть мне, поступила тревожная информация о том, что некоторые, не будем показывать пальцем кто, ввиду того, что являются плохими работниками, а возможно даже китайским шпионами, вводят в заблуждение массы, что в свою очередь крайне негативно сказывается на психическом здоровье нашего многоуважаемого водителя транспортного средства. в этой связи не будете ли вы столь любезны уменьшить время открытия на 0.7 милисекунд каждый?» форсунки подумав говорят «нивапросег чувачело» и делают что велено. после этого мозг говорит регулятору холостого хода «ты, железяка презренная, вечногрязная и вечнозабитая мусором, не работающая как надо, откройся ка пошырше чтоб почтенный водитель транспортного средства ехал дальше и берег свои нервы!». а регулятор ему в ответ «фих тебе! йяа сломалсо!». машина глохнет и лицо водителя теряет доброе выражение…
ford-trucks.club
Датчик барометрического давления — бортжурнал Volkswagen Passat 2.5 USA 2013 года на DRIVE2

Полный размер
Пару недель назад заметил на максидоте, в месте где отражается режим АКПП, загоревшийся белый гаечный ключ. Каких либо изменений в работе авто замечено не было. Решил после работы заехать на сервис к ребятам. Пока доехал ключ пропал и вернулись стандартные обозначения D P R и т.д. Подкинув комп была обнаружена единственная ошибка — «ошибка блока управления двигателем». Ребята обнулили и посоветовали наблюдать. Так как недавно занимался установкой новой оптики с ксеноном сделали ставку на возможный глюк при игре с электроникой и аккумулятором. Смущало то, что ключ появился в месте, где отражается работа АКПП. Приехав домой погрузился в сеть интернет. Вариантов ответов было море, начиная от сервисного обслуживания, заканчивая глюками и само собой поломкой АКПП (как правило на форумах по DSG — всеми любимый мехатроник). Но отличие индикации о поломке АКПП от моей заключалось в том, что при поломке АКПП ключ МИГАЛ и поочередно менялся с показателем режима коробки либо передачей. У меня ключ просто загорался и спустя какой то период времени пропадал сам по себе. Это могло происходить как во время движения, так и во время остановок. Почитав мануал к моему авто вычитал тоже самое — поломка АКПП при мигании и поочередной смене показателей… И вот спустя пару дней опять он родимый на максидоте, я на сервисе, на компе все та же ошибка — «ошибка блока управления двигателем». Конкретики никакой — вердикт — ждем чека с более конкретными диагнозами. Спустя еще пару дней выскакивает чек двигателя и я ожидаемо и целенаправленно еду к мастерам. Итог на фото — Barometric Pressure Sensors (датчики барометрического давления). После недолгих манипуляций под капотом проблема была устранена. Как оказалось виной всему был отошедший штекер отвечающий за правильность работы этого участка системы. Остается кататься и наблюдать. Надеюсь проблема устранена окончательно и бесповоротно.

Полный размер

Полный размер
Нравится 26 Поделиться: Подписаться на машину
www.drive2.ru
Барометрический датчик BMP085 | Галерея алгоритмов
BMP085 представляет из себя высокоточный цифровой датчик атмосферного давления с ультранизким энергопотреблением. С его помощью можно измерять не только давление, но и температуру. Интерфейс подключения: I2C.
Основные характеристики датчика:
| Напряжение питания | 1.8…3.6 В |
| Ток потребления | 3 мкА, 12 мкА при макс. разрешении |
| Ток потребления в режиме stand-by | 0.1 мкА |
| Диапазон давления | 300…1100 гПа (+9000…-500 м над уровнем моря) |
| Абсолютная точность измерения давления | ±2,5 гПа |
| Абсолютная точность измерения температуры | ±1,0 °C |
| Время конвертации данных | 7.5 мс |
| Среднеквадратичное значение шума | 0.06 гПа (0.5 м) стандарт., 0.03 гПа (0.25 м) при макс. разрешении |
| Скорость передачи данных по I2C | 3,4 МГц макс. |
| Диапазон рабочих температур | –40…85°С |
Этот компонент выпускается в корпусах LCC8 – не самых дружественных для самостоятельной пайки. Поэтому весьма распространены шильды, изготовители которых взяли на себя всю черновую работу и обеспечили доступ к выводам этого компонента в стандартом растре 2,54 мм.
Пример подобного шильда – модель GY-65, которая кроме собственно датчика имеет на своем борту и весь набор компонентов для работы с питанием в диапазоне 3…5 Вольт и поддержки шины I2C.
 |  |
| Пин | Название | Функция | Тип |
| 1 | GND | Масса | Питание |
| 2 | EOC | Завершение преобразования | Цифровой выход |
| 3 | VDDA | Питание | Питание |
| 4 | VDDD | Питание цифровой части | Питание |
| 5 | NC | ||
| 6 | SCL | Тактирование последовательной шины I2C | Цифровой вход |
| 7 | SDA | Данные последовательной шины I2C | Цифровой вход/выход |
| 8 | XCLR | Цифровой вход |
У вышеупомянутого шильда GY-65 выводы располагаются следующим образом:
| Шильд | Сигнал | Arduino |
| 1 | VCC | +3.3V |
| 2 | SDA | A4 |
| 3 | SCL | A5 |
| 4 | XCLR | бросаем без подключения |
| 5 | EOC | бросаем без подключения |
| 6 | GND | GND |
Для того, чтобы получить результаты измерения давления и температуры, необходимо выполнить три операции:
- считать из датчика набор калибровочных коэффициентов, которые определяются и записываются в его память в процессе производства
- запустить преобразование сигнала с внутреннего сенсора температуры
- дождавшись конца преобразования, считать полученные результаты
- рассчитать температуру
- запустить преобразование сигнала с сенсора давления
- используя калибровочные коэффициенты, с помощью соответствующих формул рассчитать фактическое значение давления.
Для выполнения перечисленных операций необходимо обращаться к датчику, а для этого – как и для общения с любым другим устройством, работающим по шине I2C, – необходимо знать его адрес. Согласно даташиту, он имеет значение 0x77.
Имеется несколько режимов работы датчика, позволяющих выбрать оптимальное соотношение энергопотребления, скорости и точности преобразований:
| Режим | Параметр oversampling_setting | Внутреннее количество выборок | Время преобразования давления макс. [мс] | Средний ток при 1 выборке/с [мкА] | RMS шум тип. [гПа] | RMS шум тип. [м] |
| ультранизкое потребление | 0 | 1 | 4.5 | 3 | 0.06 | 0.5 |
| стандарт | 1 | 2 | 7.5 | 5 | 0.05 | 0.4 |
| высокое разрешение | 2 | 4 | 13.5 | 7 | 0.04 | 0.3 |
| ультравысокое разрешение | 3 | 8 | 25.5 | 12 | 0.03 | 0.25 |
https://www.sparkfun.com/tutorials/253
http://wiring.org.co/learning/libraries/bmp085.html
http://interactive-matter.eu/blog/2009/12/05/arduino-barometric-pressure-sensor-bmp085/
www.stepwood.com
ЭЛЕКТРОМЕХАНИЧЕСКИЕ БАРОМЕТРИЧЕСКИЕ ДАТЧИКИ ВЫСОТЫ И КОРРЕКТОРЫ ВЫСОТЫ
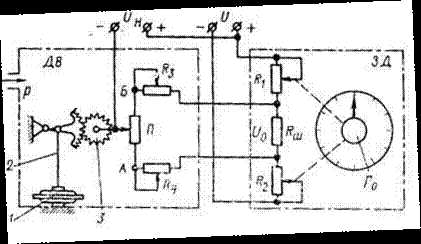
Рис.1.7. принципиальная схема датчика высоты.
1-блок анероидных коробок, 2-передаточно-множительный механизм, 3-щетка.
Некоторые автоматические устройства на самолете нуждаются в получении входного сигнала (текущее значение высоты полета) в виде электрического напряжения. Для этих целей применяют датчики высоты. Принципиальная схема датчика высоты типа ДВ-ЗО, созданного на базе механического высотомера, приведена на рис. 1.7. В герметичный корпус датчика ДВ через штуцер подается воздух из системы статического давления. Перемещение подвижного центра блока анероидных коробок 1 с помощью передаточно-множительного механизма 2 вызывает поворот щетки 3 потенциометра П, с которого снимается напряжение Uн, пропорциональное высоте полета. Реостаты R4 и R3 служат для регулировки схемы.
В приборе ДВ-ЗО значение давления у земли вводится вручную от блока задатчика давления ЗД поворотом рукоятки р0в центре шкалы и контролируется по указанию стрелки в пределах 640—780 мм рт. ст. При этом щетки реостатов R1 и R2, включенные последовательно с резистором Rш к источнику постоянного тока напряжением 27 В, не меняя величину падения напряжения Uaна резисторе Rш, сдвигают на равную величину потенциалы точек А и Б. Этим достигается ввод поправки в измеряемую высоту Uнв соответствии с фактическим значением давления р0.
Датчики высоты типа ДВ-15 регулируются на неизменное давление ро= 760 мм рт. ст. На оси щетки потенциометра укреплена стрелка, которая по шкале указывает значение абсолютной барометрической высоты полета.
Разновидностью датчиков высоты являются корректоры высоты (например, KB-11), которые выдают сигнал, пропорциональный отклонению высоты от заданного значения, и сигнализаторы высоты, выдающие электрический сигнал при достижении заданной высоты полета, например корректор высоты КВ-11, который широко применяется на самолетах и вертолетах гражданской авиации. Он входит в комплект многих автопилотов. Схема прибора изображена на рисунке 1.8а.
В основу работы корректора высоты положена следящая система на переменном токе. Чувствительным элементом корректора высоты является блок анероидных коробок БАК, помещенный в герметичный корпус. Внутренняя полость корпуса сообщается с системой статического давления самолета
При изменении высоты полета перемещается свободный центр анероидных коробок. Это перемещение передается на сигнальную обмотку СО индукционного датчика ИД.
В сигнальной обмотке возникает напряжение, величина которого пропорциональна перемещению, а фаза зависит от напряжения перемещения. Напряжение рассогласования с сигнальной обмотки поступает па величина которого пропорциональна перемещению, а фаза зависит от направления перемещения.усилитель, а затем на управляющую обмотку электродвигателя Д. Двигатель через редуктор перемещает обмотку возбуждения ОВ в такое положение, при котором сигнальная обмотка оказывается в среднем положении по отношению к обмотке возбуждения. При этом напряжение сигнальной обмотки становится равным нулю. Так работает корректор высоты, когда электромагнитная муфта ЭММ обесточена. В этом случае щетка потенциометра П удерживается пружинами в среднем положении и напряжение с него не снимается
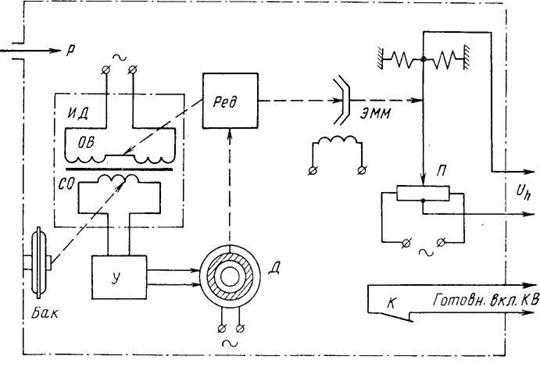
Рис.1.8а.Схема корректора высоты.
При включении корректора высоты срабатывает электромагнитная муфта, и щетка потенциометра механически соединяется с выходным валом редуктора. В этом случае при отклонении самолета от заданной высоты, на которой был включен корректор высоты, с потенциометра снимается напряжение Uh, пропорциональное отклонению h высоты от заданной.
При отключении корректора высоты (выключение питания электромагнитной муфты ЭММ) пружины возвращают щетку потенциометра в среднее (исходное) положение. В приборе предусмотрены контакты К, которые включены в систему сигнализации о совмещении щетки потенциометра со средней его точкой (сигнализация готовности корректора высоты к включению).
В целях обеспечения безопасности полетов каждому самолету устанавливается определенный эшелон заданной высоты, отсчитываемый относительно уровня с p0 = 101 325 Па. Эшелоны высот двух летящих навстречу самолетов выбираются с учетом регламентированной минимальной ширины зоны безопасности, погрешностей высотомеров обоих самолетов, удвоенной аэродинамической погрешности восприятия статического давления, удвоенной погрешности стабилизации заданной высоты.
Получение сигнала, пропорционального отклонению самолета от заданной высоты, возможно с помощью корректоров высоты (рис. 1.8б). В сервопривод руля высоты СПРВ вместе с сигналами и Uw2) , пропорциональными
отклонению угла тангажа и угло-
вой скорости wz относительно
поперечной оси самолета, от коррек-
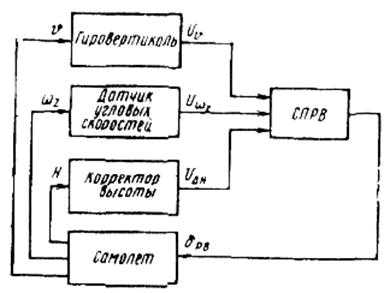
Рис. 1.8б. Схема использования корректора KB-11 в автопилоте АП-28-11
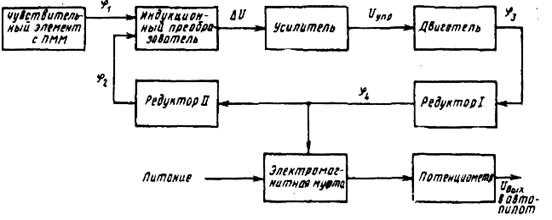
Рис. 1.8в. Функциональная схема корректора высоты типа KB
тора высоты подается сигнал , пропорциональный отклонению от заданной высоты. Суммарное отклонение брв руля высоты определяется в этом режиме сигналами U , Uwz, U H.
Применяемые в настоящее время корректоры высоты делят на корректоры высоты типа KB и корректоры-задатчики высоты типа КЗВ.
Корректор высоты типа КВ. Функциональная схема корректора представлена на рис. 1.8б. При изменении высоты перемещение жестких центров УЧЭ (анероидных коробок) через ПММ (система тяг с зубчатой парой) передается в виде угла поворота 1 на подвижную вторичную обмотку индукционного преобразователя. Первичная обмотка индукционного преобразователя с помощью двигателя и редукторов / и // поворачивается относительно вторичной обмотки. При отклонении самолета от заданной высоты на величину H сигнал U пропорциональный этому отклонению, с фазой, соответствующей знаку отклонения, поступает на вход усилителя. С выхода усилителя сигнал Uупр поступает на управляющие обмотки электродвигателя, который через два редуктора поворачивает на угол 2 первичную обмотку индукционного преобразователя до отработки угла рассогласования (до равенства 1= 2).
В работе корректора типа KB различают режимы согласования и коррекции. В режиме согласования электромагнитная муфта отключена, центрирующие пружины удерживают щетку потенциометра на средней нулевой точке, и поэтому выходной сигнал корректора отсутствует. Включением муфты в режиме коррекции обеспечивается передача угла поворота 4 выходной оси редуктора 1 щетке потенциометра, выходной сигнал Uвых которого пропорционален по величине и фазе отклонению высоты от заданного значения. При выключении муфты пружины возвращают щетку потенциометра в среднее (нулевое) положение.
В электрической схеме корректора высоты (рис. 1.8г) полупроводниковый усилитель следящей системы двухкаскадный с трансформаторной связью между каскадами. Первый каскад на базе транзистора VI
является каскадом усиления напряжения. Второй каскад собран по двухтактной схеме на транзисторах V2, V3 и является каскадом усиления мощности. Нагрузкой его служат управляющие обмотки электродвигателя М (ДИД-0,5). Выходной сигнал корректора высоты снимается с потенциометра ПКВ. Контакт НК сигнализатора готовности размыкается при смещении щетки потенциометра ПКВ от среднего (нулевого) положения. На схеме показаны цепи подключения индукционного преобразователя ИП и электромагнитной муфты ЭМ, а также штепсельный разъем ШР, с помощью которого осуществляется съем выходных сигналов.
Конструктивно корректор высоты типа KB состоит из четырех узлов: полупроводникового усилителя на плате, электродвигателя с редуктором, электромагнитной муфты с потенциометром и чувствительного элемента с индукционным преобразователем. Все узлы крепятся на одном основании и закрываются кожухом.
Корректор-задатчик высоты типа КВ. Он предназначен для выдачи сигналов в виде напряжений постоянного и переменного тока частотой 400 Гц, пропорциональных отклонению Н самолета от задан-
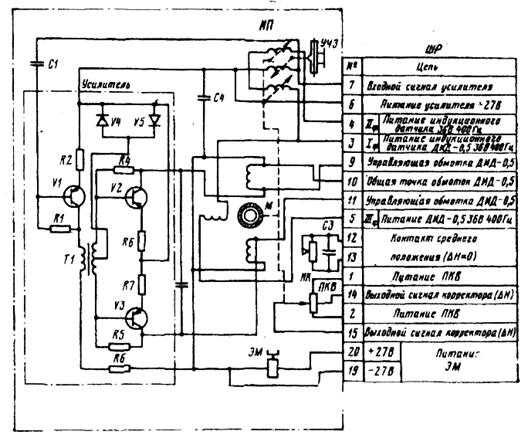
Рис. 1.8г. Принципиальная электрическая схема корректора высоты типа KB
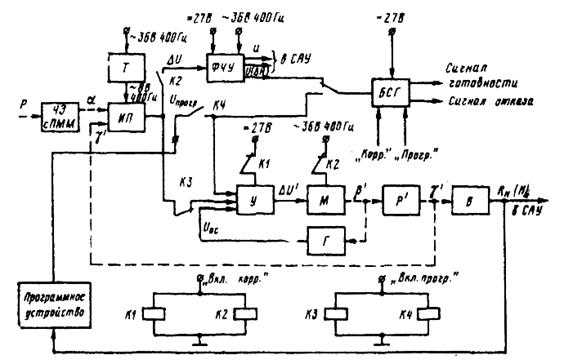
Рис. 1.8д. Функциональная схема корректора-задатчика высоты типа КЗВ
ной высоты полета (в режимах коррекции и работы от программного устройства) и относительного сопротивления, пропорционального абсолютной высоте полета (в режиме обнуления).
Корректор типа КЗВ работает в комплекте с блоком сигнала готовности БСГ, предназначенным для выдачи сигнала готовности к включению в режиме обнуления и выдачи сигналов исправности или отказа в режимах коррекции и программного управления. В блок БСГ вводятся: выходное напряжение переменного тока частотой 400 Гц с корректора, управляющие сигналы + 27 В при включении в режимы коррекции и работы с программным устройством.
На функциональной схеме корректора типа КЗВ (рис. 1.8д) показаны: чувствительный элемент ЧЭ с ПММ; индукционный преобразователь ИП; трансформатор Т, фазочувствительный усилитель ФЧУ, полупроводниковый усилитель У, двигатель М, генератор скоростной обратной связи Г, редуктор Р; узел потенциометров В; блок БСГ; реле К1 и К2, включающие режим коррекции; реле КЗ и К4, включающие режим «Программа».
В каналах взаимосвязей обозначены: угол поворота выходной оси ПММ, напряжения и переменного и U постоянного тока, пропорциональные изменению высоты Н; усиленное напряжение рассогласования U’; угол у’ поворота редуктора; угол ‘ поворота вала двигателя; выходное сопротивление Rnпотенциометра В; команда в виде напряжения постоянного тока Uпрогр с программного устройства.
Режим обнуления является подготовительным для включения корректора в режим коррекции. Входное давление р воспринимается ЧЭ. Элемент ИП преобразует перемещение жесткого центра ЧЭ в напряжение U, которое после усилителя У поступает на управляющую обмотку двигателя М. Двигатель через редуктор Р’ поворачивает щетки узла потенциометров В. Выходное сопротивление Rн будет пропорционально высоте H. Одновременно двигатель через редуктор Р’ поворачивает сердечник ИП, пока напряжение U не станет равным нулю. Двигатель М остановится.
В режим коррекции корректор КЗВ включается оператором или программным устройством после того, как достигнута высота стабилизации. В этом режиме питание элементов У и М отключается с помощью реле K1 и К2. Сигнал рассогласования U не обнуляется и существует, пока не будет достигнуто стабилизируемое значение высоты. Этот сигнал подается на усилитель ФЧУ, который выдает потребителям сигналы в виде напряжений Uи u.
В режиме работы от программного устройства корректор КЗВ позволяет доводить высоту полета до высоты, заданной специальной программой. Это достигается отработкой положения сердечника ИП механизмом корректора в соответствии с программой. Реле КЗ и К4 отключают элемент ИП от усилителя У и подключают программное устройство. Потенциометр программного устройства (на схеме не показан) совместно с потенциометром В образуют мостовую схему, выходной сигнал с которой поступает на усилитель У.
Чувствительным элементом корректора типа КЗВ (рис. 1.8е) является анероидная коробка с линейной зависимостью деформации от высоты. Подвижной жесткий центр O1 коробки через термокомпенсатор БМ и тяги T1 и Т2 взаимодействует с якорем Я индукционного преобразователя ИП. Сердечник преобразователя представляет собой Ш-образный магнитопровод. Обмотка возбуждения 0В размещена на среднем стержне сердечника, встречно включенные вторичные обмотки ВО — на крайних стержнях. Ось 02 якоря и сердечник С преобразователя ИП неподвижно укреплены на основании К, к которому жестко крепится червячная шестерня ЧШ с центром вращения 03. Биметаллическая скоба БМ осуществляет термокомпенсацию первого и второго родов .Двигатель М. служит для отработки преобразователя ИП в согласованное положение, когда зазоры и , между якорем Я и сердечником С будут равны. Усилитель У низкой частоты трехкаскадный с трансформаторной связью между каскадами. Первый каскад выполнен по схеме эмиттерного повторителя. Второй и третий каскады выполняются по двухтактной схеме.
Усилитель ФЧУ в режиме выдачи сигнала переменного тока двухтактный двухкаскадный с трансформаторным выходом. В режиме выдачи сигнала постоянного тока он представляет собой сочетание двухтактного двух каскадного усилителя с полупроводниковым фазочувст-вительным выпрямителем, снабженным RC-фидером.
В блоке БСГ сигнал переменного тока частотой 400 Гц с выхода корректора поступает в усилитель-реле, где усиливается по двухтактной схеме усиления, выпрямляется, сглаживается емкостным фильтром и в отрицательной полярности поступает на несимметричный триггер с одним устойчивым состоянием, нагруженный на обмотку реле. Когда напряжение достаточно (при неисправности корректора) для опрокидывания триггера, последний перейдет из устойчивого состояния, при котором обмотка реле находилась под током, в неустойчивое. Обмотка реле обесточится и выдаст своей контактной группой сигнал «Отказ».
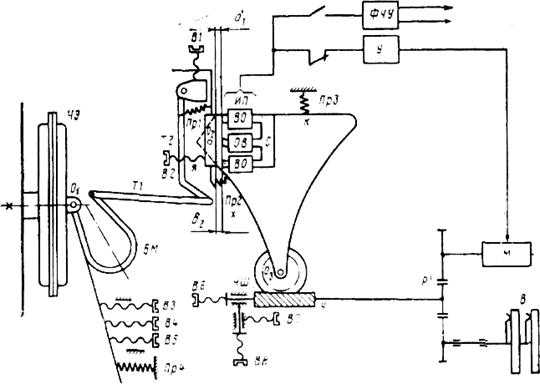
Рис. 1.8е. Кинематическая схема корректора-задатчика высоты типа КЗВ
Конструктивно корректор КЗВ выполнен в виде механизма отработки, закрытого кожухом. В него входит ряд узлов, собранных на платах (ЧЭ с ПММ, ИП, усилитель, червячная пара, трансформатор, потенциометр и т. ст.). Блок БСГ с усилителем-реле выполнен в виде отдельного блока.
Погрешности корректоров высоты. Они аналогичны погрешностям электромеханических высотомеров. При выходе из строя отдельных элементов корректора высоты или обрыве в проводах возникают неисправности. Так, обрыв проводов в индукционном преобразователе ИП или в жгуте, подводящем питание, приводит к отсутствию выходных напряжении корректора. При неисправности реле К1 и К2 (см. рис. 1.8д) подача напряжения Ч-27 В не приводит к включению режима коррекции, а при неисправности реле КЗ и К4 — режима «Программа». Выход из строя усилителя У или двигателя М приводит к неисправности системы отработки корректора. Отказ усилителя-реле блоке БСГ приводит к тому, что в режимах «Коррекция» и «Программa» отсутствует сигнал готовности. Загрязнение штуцера, редуктора или затирание в осях подвижной системы может явиться причиной медленной отработки корректора высоты. При выходе из строя элементы заменяют на исправные.
cyberpedia.su