Can ms: ELM327 BlueTooth с переключателем HS/MS CAN шины / Я Диагност
ELS27 USB RUS/ENG с авто переключателем шин HS-CAN на MS-CAN
ELS27 — адаптер для диагностики, кодирования и программирования электронных блоков управления автомобилей Ford и Mazda. С остальными автомобилями устройство выполняет функции адапера elm327. Адаптер спроектирован на базе оригинальной микросхемы.
Прибор поддерживает работу с CAN-шиной и K-L-линиями автомобилей. Адаптер получил признание среди владельцев автомобилей Ford и Mazda из-за специальных программ, разработанных для указанных моделей. Гарантированно поддерживаемые марки авто: Форд, Мазда, Линкольн, Меркури, Фиат.
Прекрасно работает с программой корерктировки одометров — Stool full (Yfi прибор успешно прошел тестирование в реальных условиях ! )
ELS27 Помимо выполнения всех функций адаптеров ELM327, данный адаптер имеет следующие отличительные особенности:
- Поддержка шин HS CAN и MS CAN (автоматическое переключение).
- Скорость работы до 10 раз быстрее по сравнению с ELM327, а значит прошивать панели можно быстрее и надежнее.
- Поддержка SW CAN (автомобили General Motors).
- Поддержка MM CAN (автомобили Focus 3 и Mondeo 4).
- Поддержка отправки мультистрочных сообщений.
Сканер ELS27, поддерживает скорость 2 000 000 бит/c, данная скорость работы адаптера необходима для подключению к блокам автомобилей Ford. Для стабильной работы программы, необходимо выставить в настройках COM-порта минимально возможный таймаут — 1мс. (Диспетчер устройств =>Порты (COM и LPT) => Выбрать COM-порт на котором определился адаптер => В свойствах перейти «Параметры порта» => Дополнительно => установить «Время ожидания» 1мс). Для работы адаптера с программой Scanmaster 2.1, необходимо, с помощью программы ELMConfig, установить скорость адаптера 38 400 бит/с.
Программы, использумые для данного адаптера:
Все программы, работающие с адаптерами ELS27 / ELM327
- ELS27 Baudrate Программа для настройки скорости и режима работы адаптера ELS27, выбранная конфигурация сохраняется внутри адаптера.
- FORScan Программа для диагностики автомобилей Ford, Mazda, Lincoln и Mercury.
- ELMConfig Программа для проведения диагностики, прошивки и конфигурации блоков автомобилей Ford Focus 2, C-MAX mk1, Kuga mk1, Mondeo 4, S-Max, Galaxy. Предназначена для смены комплектации, открытия скрытых функций.
- FoCCCus Программа для настройки автомобиля Ford Focus 3, а также частично для соплатформенников по электронной части Fiesta 7 и Kuga 2.
- STool Программа для коректировки одометров.
- ELM-FFn Программа для работы с автомобилями Ford Fusion и Ford Fiesta.
Если в Вашем автомобиле не OBD2 разъем указанный на картинке ?
Протокол MS-CAN — Astra-H CarPC Project
На этой странице собрана информация по декодированию протокола шины MS-CAN.Битрейт шины: 95238bps (значение удалось найти в прошивке оригинального TECh3)
Настройка AT90CAN128 для MS-CAN (~95Kbps, требует уточнения)
Fio = 16MHz
Prescaler = 13
Tscl = 0.8125
Tbit = 13
Tprs = 6
Tph2 = 3
Tph3 = 3
Tsjw = 1
Регистры CAN (~95Kbps, требует уточнения)
CANBT1 = 0x18
CANBT2 = 0x0A
CANBT3 = 0x25
Найдено на http://www.canhack.de/viewtopic.php?f=18&t=1054
450: Zündung , Licht Astra H
ID DLC Data
Bsp. > | 450 | 04 | 46 07 06 FF D3: FF=Licht an, 00=Licht aus
| 450 | 04 | 46 07 06 00 D2: 06=Zündstellung 2, 00=kein Schlüssel, 04=Schlüssel steckt, 05=Zündstellung14E8: Rückwärtsgang und Speed
ID DLC Data
| 4E8 |07 | 46 0F 00 00 00 00 00 | D6=00 kein Rückwärtsgang eingelegt
| 4E8 |07 | 46 0F 00 00 00 00 04 | D6=04 Rückwärtsgang eingelegt
| 4E8 |07 | 46 0F 00 00 SS SS 00 | D4= MSB Speed, D5=LSB Speed
| Шина | CAN id (HEX) | Длина (DLC) | Данные |
| MS-CAN | 180 | 8 | Дата/Время [46] [XX] [год] [месяц] [DD][DD] [секунды] [FF] Байты [DD][DD] — упакованные значения дня, часов и минут: 5 битов — день 5 битов — часы 6 битов — минуты |
| MS-CAN | 201 | 3 | Кнопки ГУ (CD30MP3) [1/0 нажата/нет] [кнопка] [длительность нажатия] Коды кнопок: 01- BC 31-39 — станции 6F- OK 6С- вправо D6- влево E0- AM/FM и CD/MP3 (??? почему то 2 кнопки с одним кодом) |
ELM327 USB с переключателем HS+MS CAN
Адаптер ELM327 с переключателем HS+MS CAN предназначен для осуществления полнофункциональной диагностики и конфигурирования автомобилей Ford / Mazda с 1995 года выпуска по настоящее время. Прибор оснащен переключателем между шинами передачи данных High Speed и Middle Speed CAN, для подключения ко всем электронным блокам в автомобиле и осуществления их конфигурирования.
Поддерживаемые электронные блоки
- BCM — бортовой компьютер (HS CAN)
- PCM — двигатель (HS CAN)
- TCM — трансмиссия (HS CAN)
- ABS — тормозная система (HS CAN)
- CCM — климат контроль (HS CAN)
- PSCM — усилитель руля (HS CAN)
- HCM — головной свет (HS CAN)
- RCM — подушки безопасности (HS CAN)
- EHPAS — электроусилитель руля (HS CAN)
- SASM — рулевое управление (HS CAN)
- IPC — панель приборов (MS CAN)
- DDM — левая передняя дверь (MS CAN)
- PDM — правая передняя дверь (MS CAN)
- AHCM — предпусковой подогреватель (MS CAN)
- EATC — климат контроль (MS CAN)
- PAM — парктроник (MS CAN)
- KVM — запуск двигателя без ключа (MS CAN)
- IPMA — обработка изображений (MS CAN)
- SODL — обнаружение препятствий слева (MS CAN)
- SODR — обнаружение препятствий справа (MS CAN)
- GEM — сигнализация (MS CAN)
- RDDM — левая задняя дверь (MS CAN)
- RPDM — правая задняя дверь (MS CAN)
- ACU — магнитола (MS CAN)
- ACM — магнитола (MM CAN)
- SRM — bluetooth (MM CAN)
- SDDJ — CD чейнджер (MM CAN)
Функции Ford ELM327 HS+MS CAN USB
- Подключение к высокоскоростной шине (HS CAN)
- Подключение к среднескоростной шине (MS CAN)
- Подключение к низкоскоростной шине (MM CAN)
- Идентификация блока управления и его версии
- Чтение текущих и сохраненных в памяти ошибок
- Расшифровка кодов ошибок
- Удаление текущих и сохраненных в памяти ошибок
- Считывание пробега в автомобиле
- Просмотр текущих значений различных датчиков
- Выполнение калибровочных процедур
- Выполнение сервисных процедур
- Конфигурирование модулей
- Сохранение конфигураций
- Ведение логов во время работы
Поддерживаемые автомобили (диагностика)
- Ford C-Max
- Ford Explorer
- Ford Fiesta
- Ford Focus
- Ford Fusion
- Ford Galaxy
- Ford Kuga
- Ford Mondeo
- Ford Ranger
- Ford S-Max
- Ford Transit
- Mazda2/Demio
- Mazda3/Axela
- Mazda5/Premacy
- Mazda6/Atenza
Поддерживаемые автомобили (конфигурирование)
- Focus II (HS + MS CAN)
- C-Max (HS + MS CAN)
- Kuga (HS + MS CAN)
- Mondeo IV (HS + MS CAN)
- S-Max (HS + MS CAN)
- Galaxy (HS + MS CAN)
Поддерживаемые протоколы OBD II:
ISO15765-4 (CAN): Audi, Opel, VW, Ford, Jaguar, Renault, Peugeot, Chrysler, Porsche, Volvo, Saab, Mazda, Mitsubishi и др.;
ISO14230-4 (KWP2000): Daewoo, Hyundai, KIA и др.;
ISO9141-2: Honda, Infinity, Lexus, Nissan, Toyota, Audi, BMW, Mercedes, Porsche и др;
J1850 VPW: Buick, Cadillac, Chevrolet, Chrysler, Dodge, GM, Isuzu;
J1850 PWM: Ford, Lincoln, Mazda.
Написать отзывИспользование шины CAN: как программно управлять автомобилем
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Автор: Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.

Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся.

Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.

Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook. Перед погружением в суть вопроса заглянем в Главу 2, где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве.
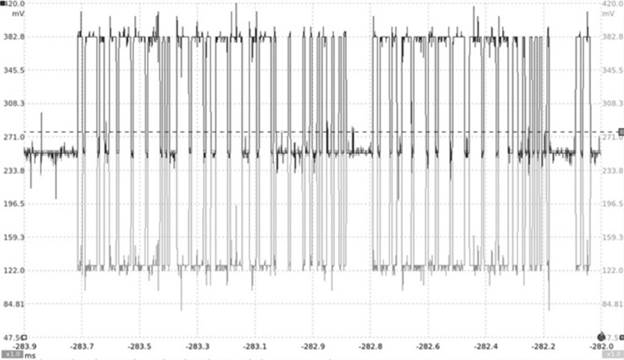
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы. Каждый пакет содержит 4 ключевых элемента:
- Арбитражный ID (ArbitrationID) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifierextension; IDE) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Datalengthcode; DLC) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.

Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).

Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN, созданного исследовательским отделом компании Volkswagen для ядра в Linux.
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
modprobe can
modprobe kvaser_usb
ip link set can0 type can bitrate 1250000
ifconfig can0 up
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
can0 33A [8] 00 00 00 00 00 00 00 00 can0 415 [8] 00 00 C4 FB 0F FE 0F FE can0 346 [8] 00 00 00 03 03 00 C0 00 can0 348 [8] 00 00 00 00 00 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F8 00 can0 3E0 [8] 00 00 00 00 80 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 34E [8] 00 00 00 00 00 00 00 00 can0 358 [8] 00 00 00 00 00 00 00 00 can0 3A4 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 3AC [8] FF FF FF FF FF FF FF FF can0 415 [8] 00 00 C8 FA 0F FE 0F FE can0 083 [8] 00 00 00 00 00 01 7E F4 can0 2FD [8] D4 00 E3 C1 08 52 00 00 can0 3BC [8] 0C 00 08 96 01 BB 27 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3BE [8] 00 20 AE EC D2 03 54 00 can0 333 [8] 00 00 00 00 00 00 00 00 can0 42A [8] D6 5B 70 E0 00 00 00 00 can0 42C [8] 05 51 54 00 90 46 A4 00 can0 33B [8] 00 00 00 00 00 00 00 00 can0 42E [8] 93 00 00 E1 78 03 CD 40 can0 42F [8] 7D 04 00 2E 66 04 01 77 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3E7 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 415 [8] 00 00 CC F9 0F FE 0F FE can0 3A5 [8] 00 00 00 00 00 00 00 00 can0 3AD [8] FF FF FF FF FF FF FF FF can0 50B [8] 1E 12 00 00 00 00 00 00
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
if frame.id == 0x356:
raw_data = unpack('BBBBBBBB', frame.data)
fan_speed = raw_data[1] / 4
driver_temp = parse_temperature(raw_data[2:4])
passenger_temp = parse_temperature(raw_data[4:6])
Полученные данные хранятся в CelsiusReport.msg:
bool auto
bool system_on
bool unit_on
bool dual
bool max_cool
bool max_defrost
bool recirculation
bool head_fan
bool feet_fan
bool front_defrost
bool rear_defrost
string driver_temp
string passenger_temp
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
CONTROL_CODES = {
'ac_toggle': 0x5C,
'ac_unit_toggle': 0x14,
'max_ac_toggle': 0x38,
'recirculation_toggle': 0x3C,
'dual_temperature_toggle': 0x18,
'passenger_temp_up': 0x24,
'passenger_temp_down': 0x28,
'driver_temp_up': 0x1C,
'driver_temp_down': 0x20,
'auto': 0x34,
'wheel_heat_toggle': 0x78,
'defrost_max_toggle': 0x64,
'defrost_toggle': 0x4C,
'rear_defrost_toggle': 0x58,
'body_fan_toggle': 0x04,
'feet_fan_toggle': 0x0C,
'fan_up': 0x2C,
'fan_down': 0x30,
}Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
rostopic pub /celsius_control celsius/CelsiusControl ac_toggle
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.

Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage. Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.